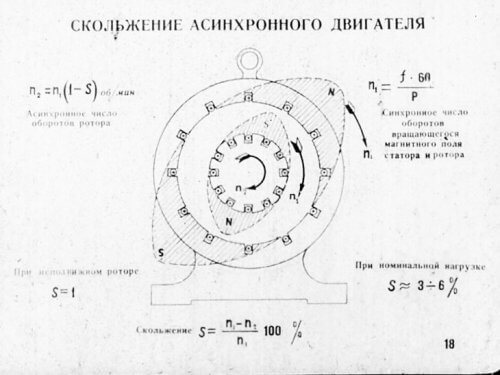
Что представляет собой скольжение асинхронной машины
В целом, принцип, по которому происходит работа трехфазного мотора очень прост. К обмотке статора подают напряжение, питающее движок. Благодаря ему появляется магнитный поток, смещенный на 120 градусов в каждой из трех фаз. А тот поток, который носит имя суммирующего будет еще и вращающимся. Обмотка якоря – замкнутый контур. В ней появляется электродвижущая сила (ЭДС), а магнитный поток, возникающей не без ее помощи, приводит ротор в работу: он начинает вращаться. Электромагнитный момент всегда будет пытаться сравнять темпы двух полей главных элементов привода: статора и ротора. Величина, которая определяет разницу между скоростями вращения вышеописанных магнитных полей и есть то самое скольжение. Мы все знаем, что ротор никогда не будет поспевать за статором, значение это никогда не будет больше единицы. Измерение можно проводить как в процентах, так и в относительных величинах. Чтобы рассчитать величину скольжения (S), нужно знать показатель частоты, с которой вращается магнитное поле (n1) и частоту, с которой вращается магнитное поле в роторе. Формула, по которой производится расчет, выглядит так: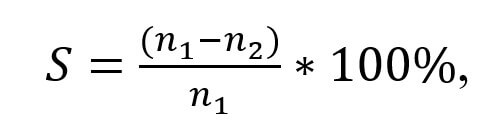 Скольжение – чрезвычайно важная характеристика мотора. Она описывает то, насколько исправна работа машины.
Скольжение – чрезвычайно важная характеристика мотора. Она описывает то, насколько исправна работа машины.Скольжение в разных условиях работы привода
Если режим работы агрегата – холостой, искомый показатель всегда будет близок к нулевому значению или, по крайней мере, не превысит 3%. Это связано с тем, что n1 будет практически равен n2. Несмотря на то, что значение всегда близко к нулю, нулевым оно быть не может, потому что поля ротора и статора не пересекаются. Другими словами, вращение мотора отсутствует, как и подача на него напряжения. Скольжение (если считать его в процентах) не будет нулевым даже в том случае, когда электродвигатель находится в режиме идеального холостого хода. Зато, если агрегат запущен в режиме генератора, S может быть отрицательным. Такой режим (в нем ротор вращается противоположно относительно статора) будет показывать S, значениям бывают разными, но изменяются только в следующих пределах:-∞<S<0
Надо отметить, что есть также электромагнитное торможение или противовключение якоря. В таком случае скольжение может быть больше, чем единица и положительным. [caption id="attachment_3960" align="aligncenter" width="509"]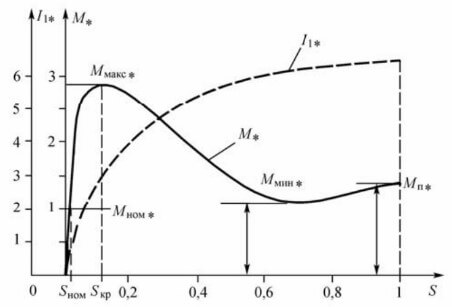 Рисунок 1[/caption] Частота тока в катушках якоря (f1) равна частоте сетевого тока, но только при пуске агрегата. Если нагрузка номинальная, то частоту электротока (f2) можно высчитать по формуле ниже:
Рисунок 1[/caption] Частота тока в катушках якоря (f1) равна частоте сетевого тока, но только при пуске агрегата. Если нагрузка номинальная, то частоту электротока (f2) можно высчитать по формуле ниже:f2=S*f1
Якорный ток имеет прямую зависимость от его индуктивного сопротивления. Это значит, что электроток в якоре зависит от скольжения асинхронного электромотора. Момент вращения агрегата также зависит от S. Его определяют показатели магнитного потока, угла сдвига между электродвижущей силой и якорным электротоком. Как видно из всего вышесказанного, чтобы провести детальное исследование всех параметров электропривода, нужно установить зависимость. Она схематически изображена на рисунке 1. Это, в свою очередь, означает, что если ввести в якорную цепь асинхронного двигателя, ротор которого фазный, дополнительное сопротивление, можно регулировать изменение момента в нем, если значения скольжения S различны. Если ротор в приводе короткозамкнут, момент можно регулировать с использованием преобразователя частоты или двигателя с переменными параметрами. Если нагрузка на электродвигатель номинальная, S будет равно значениям от 8% до 2%. Это скольжение будет носить название номинального. Увеличивая нагрузку на вал ротора (то есть момент), будет происходить пропорциональное увеличение величины скольжения. Выражаясь проще, можно сказать, что роторное магнитное поле никогда не будет быстрее статорного. То есть первое будет тормозить. Увеличивая скольжение, вы, конечно, добьетесь пропорционального роста тока в якоре. И момент, естественно, тоже вырастет. Но нужно всегда учитывать, что вместе с этим будут расти и активные потери ротора (то есть произойдет увеличение сопротивления). Это повлияет на снижение силы тока и уменьшение коэффициента мощности. Результат: рост момента будет медленнее, чем скольжения. Критическое скольжение – максимальная величина момента, которой можно достигнуть при определенном S. После того, как момент станет максимальным, он начнет идти на убывание. Обозначаю показатель, как правило, через Sкр. Механическая характеристика, в своем графическом проявлении, выглядит следующим образом: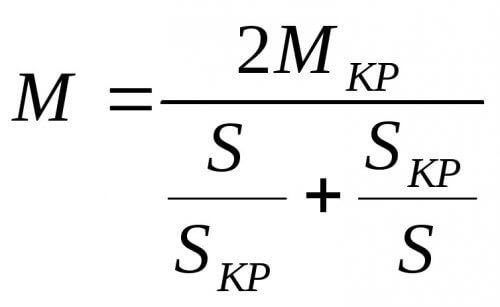 В данном выражении (его еще называют формулой Клосса) используется величина критического момента (Мк). Его и определяет величина критического скольжения. График строят, основываясь на характеристиках из документов асинхронной машины. Все вопросы, возникающие по поводу асинхронного агрегата, работающего в режиме движка, решают с помощью данного графика. Величина допустимого значения мгновенного перегруза электромотора определяется критическим моментом. В случае развития еще более критического М (и, конечно же, увеличения Sкр), можно наблюдать опрокидывание агрегата. Когда это происходит, машина просто перестает работать и выключается. Это аварийный режим.
В данном выражении (его еще называют формулой Клосса) используется величина критического момента (Мк). Его и определяет величина критического скольжения. График строят, основываясь на характеристиках из документов асинхронной машины. Все вопросы, возникающие по поводу асинхронного агрегата, работающего в режиме движка, решают с помощью данного графика. Величина допустимого значения мгновенного перегруза электромотора определяется критическим моментом. В случае развития еще более критического М (и, конечно же, увеличения Sкр), можно наблюдать опрокидывание агрегата. Когда это происходит, машина просто перестает работать и выключается. Это аварийный режим.