Как правильно установить бесколлекторный двигатель с использованием системы адруино, что в наше время употребляется с современными моторами, применение регуляторов в таких двигателях, принципы и схемы воздействия приборов управления. В этой статье осмотрится регулирование стремительностью, верчения бес сенсорного и бесколлекторного электродвигателя долговременного потока Sensorless BLDC outrunner motor, почасту приспособленного для создания дронов через ESC (Electronic Speed Controller – электрический регулятор силы и платы Arduino. Сейчас замечается самобытный интерес к сооружениям разнообразных летательных устройств – дронов, вертолетов и т. Теперь их позволено просто сотворить вручную из-за великой численности конструктивности аппарата в интернете. Все они парящие аппараты употребляют ради своего процесса так именуемых бесщеточных (бесколлекторные) электродвигатели долговременного потока (BLDC - Brushless DC Motor). Что являют собой похожие движки? Отчего собственно они в наше время употребляются в всевозможных относящихся дронах? Как нужно приобрести похожий движок и включить его к микроконтроллеру? Что вообще ESC и зачем важно его задействовать? Решения всех этих вопросов можно найти в этой статье.
Подключение бесколлекторных двигателей для ардуино Бесколлекторные движки создались предельно не так давно и изготавливаются ради оптимизации электродвигателей неизменного тока. Бесколлекторные двигатели насыщаются трехфазным неустойчивым потоком. Они эффективно функционируют в более размашистым спектре витков и имеют большие значения КПД. Но и тут установка мотора проще, нет щеточного узла, что безостановочно трется с ротором и организовывает искры. Следовательно они абсолютно не изнашиваются.

По составу бесколлекторные двигатели поделаются две категории: inrunner и outrunner. Моторы inrunner обладают размещением по внутренней плоскости туловища обвивки, и циркулирующий внутри электромагнитный ротор. Движки outrunner обладают недвижимыми намотками внутри двигателя, кругом каких вертится корпус с пристроенными на вовнутрь стенку долговременными магнитами. Переключение в бесколлекторном движке (БД) исполняется и руководится с использованием электроники.
Контроллеры бесколлекторных двигателей ESC регуляторы Для управления без распределительного двигателями применяют специфические регуляторы - ESC (Electric speed controller — электрический датчик быстроты, регуляторы. Задача контроллера находится так, дабы подать энергию долговременного потока от батареи к трехфазному бес распределительному мотору. Для подачи мощности регулятор употребляет MOSFET — ключи силы, что могут раскрываться и закрываться в секунду. Ежели силы одного ключа мало, употребляется немного ключей, аннексированных единовременно. Поочередное включение/выключение этапов удерживает циркуляцию движка. За изменением фаз наблюдает контроллер контроллера.
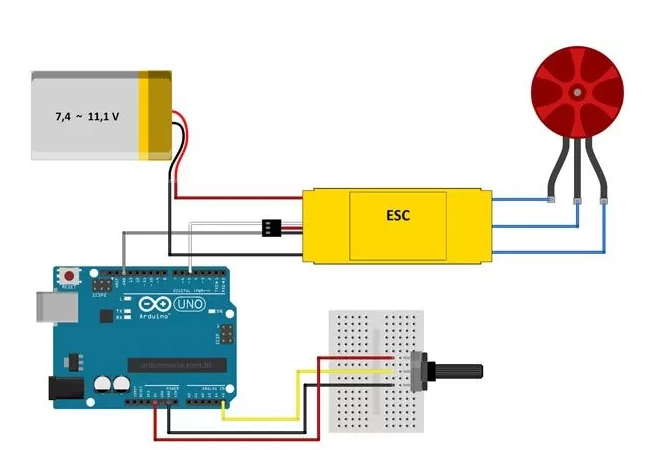
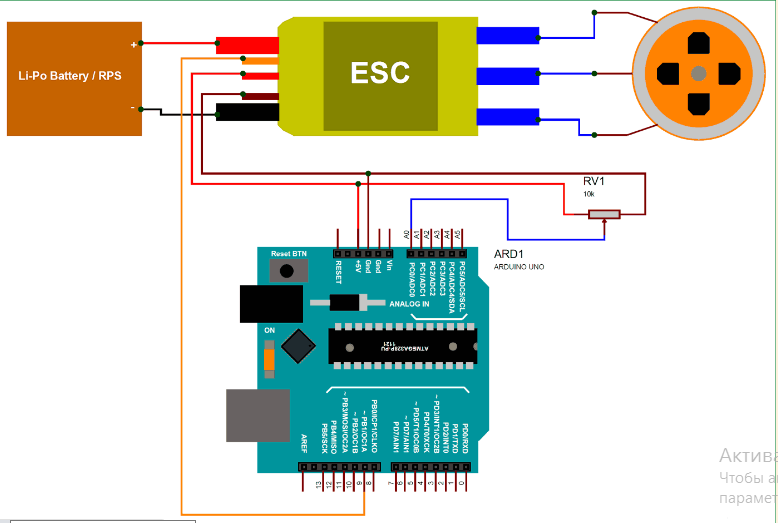
Механическая программа ESC управления: Требуемые составляющие · Плата Arduino - бесколлекторный двигатель непрерывного потока). · ESC (20A) (электронный датчик быстроты) · Родник питания (12V 20A). · Потенциометр · Соединение к плате Arduino Программа включения бесколлекторного мотора с ESC-коммутатором к плате Arduino представлена на рис. Ради осуществления включения управляющего устройства к плате Arduino употребляется 2 шнура: · темный – земля; · светлый – руководящий. Красный шнур редуктора представляется не началом, а выходом с усилием +5В, что позволено употреблять ради направления силы платы Arduino. Свидетельства потенциометра возможно употреблять для руководства стремительностью движка. Для руководства ним нужно употреблять Arduino-библиотеку Servo.
Наименьшие и наибольшие значения движущегося сигнала 800 мк\сек и 2300 мксек. Затем после установки скетча на плату Arduino показано что сердце аппарата не включается и не отзывается на движения потенциометра. Стабилизатор нужно отрегулировать, дабы он задействовал малые и наибольшее суммы. Для этого перед подачей силы на стабилизатор, экспонируется потенциометр в самое большое значение. Направляется питание. Когда уже слышно "пиканье" движка. Перемещается потенциометр в маленькое значение, должно быть слышно три пиканья. Тогда редуктор откалиброван. Далее желательно повторить потенциометр, нужно скоординировать живость мотора.
Принцип воздействия BLDC движков Бесколлекторные электродвигатели хронического потока (BLDC двигатели) в момент движения зачастую употребляются в домашних пропеллерах и электрических передвигающихся транспортных аппаратах из-за их плавного и легкого вращения. В силу от иных электродвигателей долговременного потока BLDC движки включаются с использованием тремя концами, торчащих из них, но таков любой шнур создает личную фазу, тогда и приобретаем многофазный моторчик. Впрочем BLDC причисляются к движкам непрерывного тока они руководятся с поддержкою очередности толчков. Для переустановки усилия хронического тока в стройность толчков их по 3х кабелям употребляется регулятор ESC (Electronic speed controller). В какой-то момент работы топливо накладывается исключительно на пару из фаз, это значит что гальваническое течение забегает в сердце сквозь одну фазу, и выходит через иную. Когда в последствии такого движения запитывается катушка внутри мотора, это вызывает к тому, что магниты сглаживаются по касательству к катушке с таким же окончанием. Впоследствии регулятор ESC подает топливо на остальные два кабеля (или фазы) и такой ход перемены шнуров, на что издается сила, длится непрерывно, что принуждает электродвигатель циркулировать. Быстрота вращения мотора в зависимости от быстроты подачи питания на катушку мотора, а направленность циркуляции – от распорядка замены фаз, на что попеременно направляется мощность. Используют разные разновидности BLDC моторов – тут осмотрим генеральные с имеющихся. Распознают Inrunner и OutRunner BLDC двигатели.
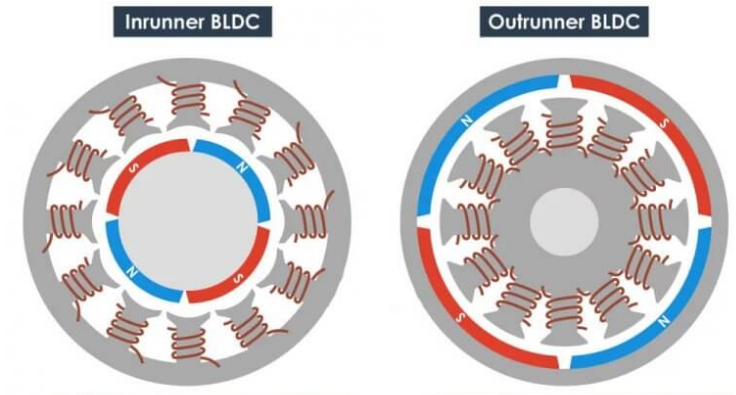
· В Inrunner движках магниты ротора ориентируются внутри статора с обвивками, · а в OutRunner движках магниты находятся наружно и вертятся кругом недвижимого статора с намотками. Собственно означает что в Inrunner (по данному способу проектируется большое количество движков хронического потока) ось внутри мотора вертится, а основа мотора так и будет стоять на месте. А в OutRunner электродвигатель вертится кругом оси с катушкой, что также будет неподвижной. OutRunner движки очень комфортны для использования в электрических мопедах, поелику наружная кора мотора естественно задействует к движению колесо аппарата, и это разрешает наладится без установки сцепления. Так же OutRunner движки гарантируют сильный ворочающий момент, который осуществляет их еще совершенным избранием для употребления в гальванических перемещающихся приборах и дронах. Следовательно и в этой заметке будет анализироваться присоединение к платы Arduino мотора OutRunner вида. Имеется еще подобный элемент BLDC моторов как бесстержневой (coreless), что обретает использованием в маленьких дронах. Такие электродвигатели функционируют по изрядно другим методикам, но анализ их работоспособности не вписывается в границы исходной статьи.
Образчик употребления К примеру настройка самодействующего калибровку ESC-редуктора при запуске скетча Arduino. Тут будет нужно иметь последующие приборы: · Плата Arduino Uno – 1; · Плата установочная – 1; · Сердце мотора бесколлекторное – 1; · ESC-устройство контроля– 1; · Потенциометр 10 кОм – 1; · Источник силы 12 В – 1; Для осуществления калибровки в настройках setup вырабатывается эмуляцию передачи потенциометра м наибольшее и наименьшее размещение. BLDC движки с преобразователями (Sensor) и без них (Sensorless). В использовании BLDC агрегатов, что крутятся плавно, без резких движений, надобна возвратная связь. Следовательно регулятор ESC вынужден быть настроен на позиции и полюса магнитов ротора дабы конкретно подсоединять статор. Такое можно осуществить двумя методами: основной из них состоит в установке измерителя Холла внутри мотора. Преобразователь Холла должен открывать магнит и транслировать информацию об сделанном в проверщик ESC. Данный элемент движков именуется Sensor BLDC (с регулятором) и он обретает использование в электрических передвигающихся транспортных агрегатах. Второй способ высказывания позиции магнитов содержится в содействии оборотной ЭДС (электродвижущей силы), Формировавшийся катушками когда магниты встречаются с ними. Совершенством данного способа представляется то, что он не спрашивает употребления каких-то добавочных установок (датчик Холла) – фазово чувствительное проведение независимо от них применяется в свойстве возвратной связи вследствие присутствия возвратной ЭДС. Такой прием употребляется в моторе, показанном в этой статье, и собственно его чаще приспосабливают в дронах и прочих летательных приборах. Огромный вращающийся момент, что имеет большое значение дабы отколоть парящий орган от земли;
- · данные моторы приемлемы в объеме OutRunner, они помогают наладится без употребления сцепления в установке дрона;
- · небольшой уровень пульсаций во время движения, что тоже авторитетно для недвижного остановки дрона в воздухе;
- · превосходное отношение силы к весу мотора. Такое крайне хорошо употреблять на носящихся аппаратах дабы каждый элемент его установки обладал максимально минимальный вес.
Обыкновенный электродвигатель хронического потока, гарантирующий подобной же движущий пункт как и BLDC моторе, будет по крайней мере вдвое тяжелее того. Отчего дроны и вертолеты употребляют собственно BLDC движках? Теперь имеется много всевозможных разновидностей дронов – с парами лопастями, с четырьмя штуками т. Но они создаются только из BLDC двигателей. Отчего собственно такие, ведь BLDC движки обходятся подороже нежели простые электродвигатели долговременного тока?
Почему необходим регулятор ESC Уже понятно что для работоспособности BLDC движков важен некоторый регулятор, что реорганизует силу непрерывного потока от батарейки в методичность импульсов, направляемую в нужном распорядке на кабели (фазы) движков. Данный регулятор именуется ESC (Electronic Speed Controller – электрический регулятор быстроты).

Фундаментальной ответственностью предоставленного регулятора представляется верный впуск питания на шнуры мотора дабы он обращался в подходящем движении. Это делается с учетом возвратной ЭДС (back EMF) с любого из кабеля и направления мощности на катушку тогда, когда магнит встречается с ней. Внутри аппарата датчик ESC охватывает довольное количество всевозможной электроники и если нужно, то следовательно полно изучить его строение по материалам в сети интернета. Ключевые составляющие его аппарата.
Не стартуют электромоторы · Проконтролируйте присоединение движков ESC-коммутатору, ESC-регулятора к блоку силы и ардуино. · Осуществить также важно калибровку ESC-резистора. · Регулирование быстротой циркуляции на основании широтно-импульсной модуляции. · Регулятор ESC способствует управлению стремительностью верчения BLDC мотора с учетом предупреждения ШИМ создаваемого на него апельсиновый проводок Способ руководства таким мотором весьма подобен на регулирование сервомоторами. Знак ШИМ, доставляемый на датчик ESC, вынужден обладать ступенью 20ms, а коэффициент наполнения данного ШИМ значения должен предназначать быстроту вращения BLDC аккумулятора. Поелику несомненно такой метод применяется ради руководства углом разворота сервомотора, тогда для руководства BLDC движком возможно пользоваться библиотекой руководства сервомоторами. Battery Eliminator Circuit (BEC) – цепь, без батареи. Каждый регулятор ESC поставляют с данной схемой.
Такая схема ликвидирует надобность в употреблении разной батареи для заживления микро контроллера, ведь она потребляется в доставленном способе и не потребуется раздельный родник кормления для платы Arduino – регулятор ESC самостоятельно питает плату Arduino контролируемым усилием питания +5V. В разнообразных резисторах ESC применяются неодинаковые схемы управления доставленной мощности, но в неких ситуациях схема широко употребляемая с линейным руководством . Интегрированное ПО. Произвольный датчик ESC охватывает в собственном ПЗУ установленную практическую систему, прописанную изготовителем прибора. Такая установка помогает описывать идею работоспособности регулятора. преимущественно знаменитыми интегрированными кодами для таких ESC представляются Traditional, Simon-K и BL-Heli. Эта система может модифицироваться человеком.
Кое-какие фразы, употребляемые в теме BLDC и ESC Коротко предоставим генеральные из данных слов:
Braking (торможение) – описывает пару живо BLDC электродвигатель сможет выключить свое движение. Это значительно для летательных приборов поелику им важно зачастую переменять число витков мотора в секунду дабы лавировать в воздухе.
Soft Start (плавный пуск, старт) – эта возможность исключительно главная для BLDC движков если закручивающий момент от него на движущейся механизм (колесо и тд.) подается посредством механизма подачи, нормально заключающийся из шестерен. Гладкий запуск означает, что электродвигатель не инициирует вращения мгновенно с наибольшей живостью, а может добавлять свою быстроту верчения потихоньку самостоятельно от того, с какой стремительностью наращивается распоряжающиеся реакция. Плавный запуск основательно сокращает амортизацию шестерен, помещающихся в трансмиссионный агрегат.
Motor Direction (направление верчения мотора) – в основном направленность верчения BLDC движков не переменяется в движении эксплуатации, впрочем когда производства и тестирования произведения аппарата возможно понадобиться модифицирование стороны верчения движка, нормально такое позволено совершить попросту сменив друг с другом какие-то два шнура аппарата.
Low Voltage Stop (остановка при низком усилии мощности). Естественно BLDC движки градуируют для того чтоб при одной степени ворочающего действия быстрота его циркуляции была выдержанной. Впрочем такого значения нелегко добиться так как спустя некое время усилие питающей батареи снижается. Дабы предупредить такое простые резисторы ESC переделывают подобным типом для остановки произведение BLDC мотора если усилие питающей батареи спускается вниз поставленной рубежа. Впрочем данная методика хороша при содействии BLDC движков в дронах.
Response time (время отклика, реакции или ответа). Обозначает дееспособность мотора скоро переменять быстроту циркуляции при смене ворочающего момента. Нежели время реакции меньше, тогда управление над инструментом улучшается.
Advance (движение вперед). Эта задача представляется необыкновенной больной темой для BLDC моторов. Все BLDC движки располагают мелкий сходственный баг. Эта задача обусловлена тем, что если шпулька статора запитана, ротор передвигается впредь поелику там существует безостановочный магнит. И ежели распоряжающееся сила с нее снимается (дабы дать ее на последующую катушку) ротор движется вперед чуть-чуть далее нежели предвидено методикой работоспособности агрегата. Это нежелательное углубление мотора впредь в английском нарекают “Advance” и оно возможно будет приносить к ненужным циркуляциями, перегреву и гулу при движении приборов. Следовательно превосходные резисторы ESC усердствуют по способности ликвидировать данный результат в движении BLDC моторов. У определенных контроллеров ESC нет конечных кабелей, тогда уже надо будет добавлять линии от BLDC мотора к коммутаторам регулятора ESC. Программа BEC (Battery Eliminator circuit) в приборе ESC будет свободно гарантировать систематическое усилие +5V, следовательно можно естественно пользоваться для усиления платы Arduino. Для руководства стремительностью циркуляции мотора в схеме употребляется потенциометр, присоединенный к системе A0 платы ардуино.
Пояснение программки для Arduino Для руководства BLDC движком нужно переформировывать ШИМ предупреждение с частотой 50 Гц и заменить от 0 до 100% знаком заполнения. Свойство коэффициента наполнения будет создаваться с поддержкою потенциометра. Это значит циркуляцию потенциометра, нужно будет управлять стремительностью верчения инструмента. Его регулирование весьма схоже на регулировку сервомотором с поддержкою ШИМ 50 Гц, следовательно в предоставленном случае употребляют такую же библиотеку, что воспользовались ради руководства сервомотором.
Испытание произведения схемы Нужно произвести все важные составления в методике, загрузить программу в плату ардуино и подключить к питанию на регуляторе ESC. Удостоверитесь что BLDC электродвигатель точно прикреплен, по-иному он будет скакать во время работы. Если вы подадите силу на регулятор ESC будет слышно приветственный звук и будет выпускать сей шум до тех пор пока не пристроится руководящее предупреждение установленного значения (в установленных пределах). Инициируйте потихоньку циркуляцию потенциометра дабы на его выходе усилие разнилось от 0, и шум остановился. Такое действие означает, что установлен на регулятор ШИМ сигнал минимум позволительно степени. При следующем кружении ручки потенциометра электродвигатель активизируется при медленном вращении. При другом повороте ручки аппарата и росте усилия на выходе быстрота верчения мотора будет расти. Если сила достигнет максимальной возможной величины, сердце аппарата остановится. https://www.youtube.com/watch?v=8xGrPpXyc5w