Так как современный мир все больше углубляется в необходимость автоматизации промышленных процессов, многочисленные роботизированные направления становятся все более распространенными.  Поэтому такое устройство как контроллер робота манипулятора относится к часто встречающимся темам, реализовать которые сейчас и внедрить стараются не только на специализированных предприятиях, но и для индивидуального использования. Рассмотрим подробнее.
Поэтому такое устройство как контроллер робота манипулятора относится к часто встречающимся темам, реализовать которые сейчас и внедрить стараются не только на специализированных предприятиях, но и для индивидуального использования. Рассмотрим подробнее.
Актуальность и необходимость решений
Контроллер для роботов манипуляторов помогает:- рациональное распределение трудовых ресурсов персонала разного уровня;
- повышение качественных показателей на производстве;
- снижение временных затрат на исполнение;
- снижение себестоимости товаров;
- увеличение выпуска за счет ускорения операций;
- и ряд других плюсов.
 Контроллеры необходимы для участия в управлении роботами манипуляторами, так как оборудование должно соответствовать высоким требованиям, которые касаются точности положений и позиционирования, числу степеней свободы и подвижности каждого из звеньев. По этой причине разработка такой техники состоит из целого ряда этапов. К особенностям роботов манипуляторов с использованием программируемых контроллеров необходимо причислить:
Контроллеры необходимы для участия в управлении роботами манипуляторами, так как оборудование должно соответствовать высоким требованиям, которые касаются точности положений и позиционирования, числу степеней свободы и подвижности каждого из звеньев. По этой причине разработка такой техники состоит из целого ряда этапов. К особенностям роботов манипуляторов с использованием программируемых контроллеров необходимо причислить:- наличие сложной кинематической структуры с большим числом взаимосвязанных или независимых между собой звеньев;
- необходимость контроля положения каждого из конструктивных элементов системы;
- управление в синхронном режиме целого ряда двигателей.
Конструктивные особенности и принципы работы
Прежде, чем разобраться с составляющим компонентом в виде контроллера для роботов манипуляторов, необходимо рассмотреть основные аспекты конструктивного плана у последних. Такие устройства предназначены для обеспечения перемещения различных объектов (с разными параметрами) с заданными ориентациями и по определенной траектории. Для решения этой задачи в системе расположено порядка 6-ти степеней свободы. Роботы манипуляторы имеют разное назначение, поэтому для них используют разные типы приводов. Но главными задачами оборудования все равно при этом являются позиционирование рабочего элемента в пространстве и перемещение по подходящей траектории. Электрический привод используют наиболее часто благодаря его очевидным достоинствам:
Такие устройства предназначены для обеспечения перемещения различных объектов (с разными параметрами) с заданными ориентациями и по определенной траектории. Для решения этой задачи в системе расположено порядка 6-ти степеней свободы. Роботы манипуляторы имеют разное назначение, поэтому для них используют разные типы приводов. Но главными задачами оборудования все равно при этом являются позиционирование рабочего элемента в пространстве и перемещение по подходящей траектории. Электрический привод используют наиболее часто благодаря его очевидным достоинствам:- высокий показатель КПД;
- небольшие габаритные размеры и вес;
- удобное и понятное управление;
- настройка широкого интервала мощностей.
Управление приводами манипуляционного робота
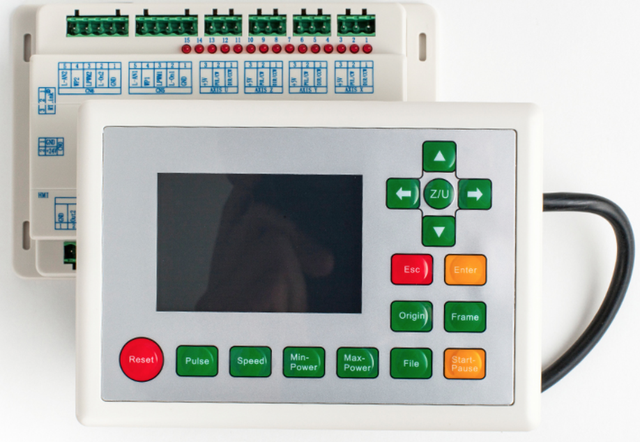
Управляющие контроллеры роботов манипуляторов работают при взаимодействии с персональными компьютерами, которые отвечают за расчеты и формирование программ. Микроконтроллер по этой причине должен соответствовать ряду критериев:- у прибора должен присутствовать набор цифровых и аналоговых входных каналов, которые необходимы для датчиков и других периферийных приборов;
- стандартный интерфейс с определенным протоколом;
- разрешение шины должно составлять не менее 1 мкс;
- управление скоростью и ускорением должно быть организовано по отдельности для каждого из каналов;
- высокие показатели производительности;
- высокоточная поддержка вычислений.
Основной список систем управления
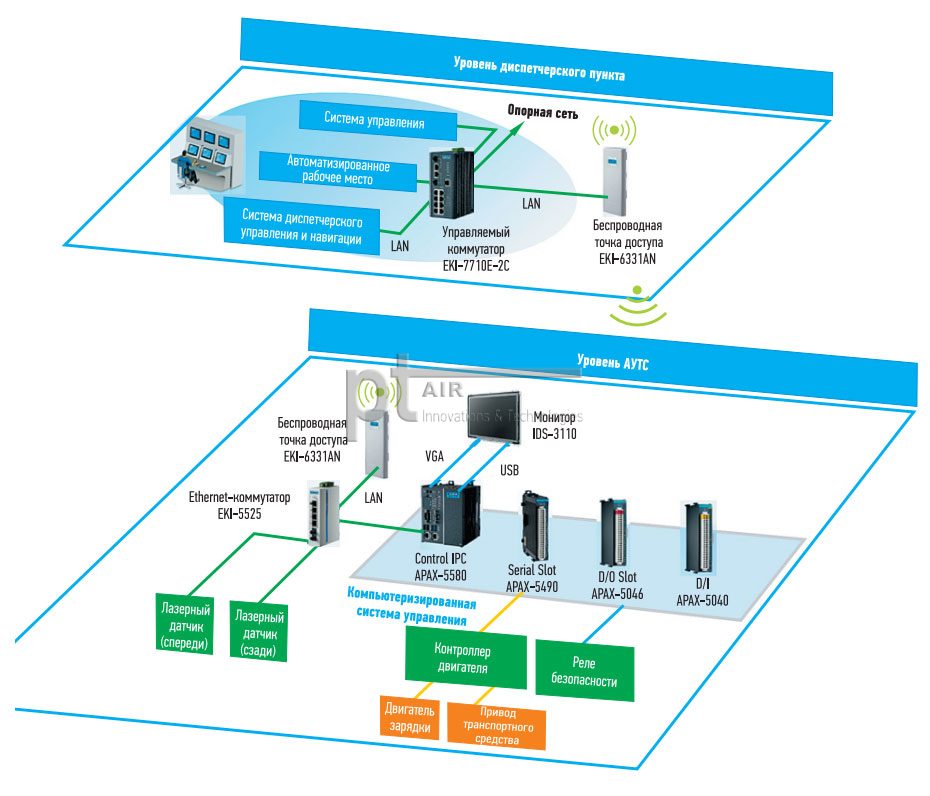
Чтобы не совершать распространенных ошибок, можно подобрать не сам контроллер для управления роботом, а сразу полноценную систему, в которой уже будет присутствовать подходящий для решения конкретных задач прибор.Сегодня к одним из наиболее популярных и эффективных относят следующие бренды: Yaskawa Motoman, ABB, Fanuc, Kuka. Их отличие от самостоятельных сборок заключается в присутствии закрытых решений.Это означает, что такие устройства включают в себя все компоненты от одного разработчика. Такой подход позволяет обеспечить максимальную совместимость и минимизирует потенциальное возникновение поломок. Некоторые из систем базируются на принципах модульной структуры, которые позволяют посредством одного контроллера через Ethernet подключать целый набор других микроконтроллеров. Последние предназначены для управления отдельными роботами манипуляторами, что крайне удобно для производственных условий.
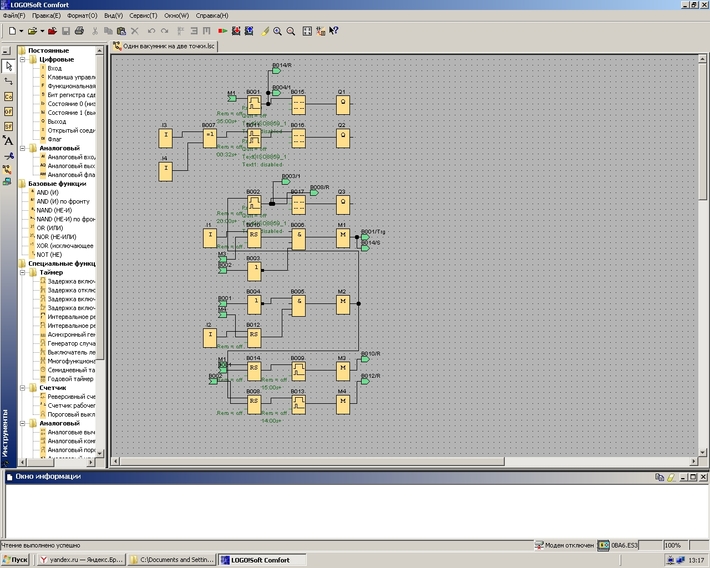
 Другим решением становятся роботы, выполненные на базе промышленных компьютерах, но использующих классическую и максимально простую ОС Windows. Но при этом они оснащены специальными расширениями. В таком случае управление роботами манипуляторами производится при помощи плат ввода и вывода. В соответствии с требованиями разработчиков могут применяться разные протоколы. Есть также и более простые вариации. Например, отечественная разработка Сфера-36, которая с помощью контроллера робота манипулятора отвечает за управление Puma-560. Системы позволяют вводить максимально простые текстовые программы и последовательности требуемых перемещений в пространстве. То есть в режиме реального времени происходит обучение. Но такой формат предполагает наличие недостатков. Качество управляющих процессов снижается за счет необходимости применения аналоговых сигналов.
Другим решением становятся роботы, выполненные на базе промышленных компьютерах, но использующих классическую и максимально простую ОС Windows. Но при этом они оснащены специальными расширениями. В таком случае управление роботами манипуляторами производится при помощи плат ввода и вывода. В соответствии с требованиями разработчиков могут применяться разные протоколы. Есть также и более простые вариации. Например, отечественная разработка Сфера-36, которая с помощью контроллера робота манипулятора отвечает за управление Puma-560. Системы позволяют вводить максимально простые текстовые программы и последовательности требуемых перемещений в пространстве. То есть в режиме реального времени происходит обучение. Но такой формат предполагает наличие недостатков. Качество управляющих процессов снижается за счет необходимости применения аналоговых сигналов.