Конструктивное решение
Подобно любому электроприводу, синхронные двигатели (СД) представляют собой преобразователи, превращающие электроэнергию в механическую работу. Они также относятся к обратимым механизмам и могут работать в генераторном режиме. В этом случае электрооборудование не является приводами подвижных частей производственных или инженерных установок, а наоборот выступает в качестве источника электроэнергии. Ярким примером подобного применения могут служить гидро- или турбогенераторы.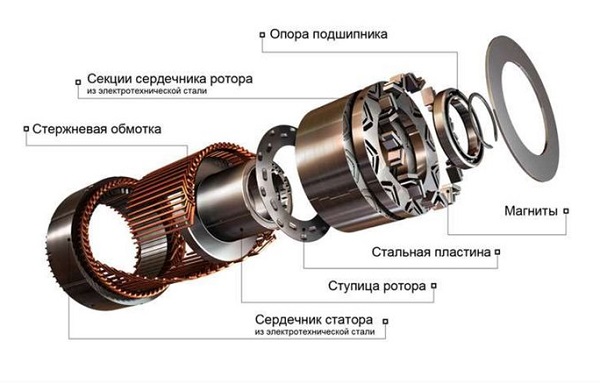 Аналогично асинхронным моторам СД работают от источника переменного тока, имеют два основных рабочих узла – статор и ротор. Первый обладает абсолютно идентичной конструкцией, является стационарным элементом устройства и известен также как индуктор или индукторное колесо. Его основные компоненты:
Аналогично асинхронным моторам СД работают от источника переменного тока, имеют два основных рабочих узла – статор и ротор. Первый обладает абсолютно идентичной конструкцией, является стационарным элементом устройства и известен также как индуктор или индукторное колесо. Его основные компоненты:- корпус с расположенной на нем коробкой для электроподключений;
- шарикоподшипники, предназначенные для опоры роторного блока;
- опорные элементы подшипников;
- вентилятор, обеспечивающий отвод тепла во время работы электропривода;
- защитный кожух, отделяющий вращающийся вентилятор от корпуса.
 Второй функциональный узел – ротор – обладает индивидуальными особенностями построения, вращается и является непосредственным инструментом передачи механической энергии приводимым рабочим узлам. Его также называют якорем. Именно структурой роторного блока отличаются между собой электроприводы синхронного и асинхронного типа. В зависимости от нагрузки, которую должен воспринимать СД и, соответственно, параметров его мощности, роторный механизм, имеющий в своем составе сердечник, конструируют разными способами. Это может быть:
Второй функциональный узел – ротор – обладает индивидуальными особенностями построения, вращается и является непосредственным инструментом передачи механической энергии приводимым рабочим узлам. Его также называют якорем. Именно структурой роторного блока отличаются между собой электроприводы синхронного и асинхронного типа. В зависимости от нагрузки, которую должен воспринимать СД и, соответственно, параметров его мощности, роторный механизм, имеющий в своем составе сердечник, конструируют разными способами. Это может быть:- синхронный двигатель с постоянными магнитами (СДПМ) на якорном узле, обеспечивающими магнитоэлектрическое возбуждение;
- электромашина с электромагнитами, осуществляющими электромагнитное возбуждение.
 Постоянные магниты выполняются из магнитотвердых материалов (прецизионных сплавов), обладающих высокой остаточной магнитной индукцией. Их характерная особенность заключается в способности сохранять длительное время состояние намагниченности. Магнитотвердые изделия бывают разной формы и являются автономными источниками (не потребляющими энергии) магнитного поля. Относительно способа установки магнитов СД делятся на электродвигатели с поверхностным и встроенным расположением магнитных элементов. Электромагниты, как следует из самого названия, связаны с электрическим током. Это устройство состоит из ферромагнитного сердечника и обмотки, которая, находясь под напряжением, инициирует возникновение магнитного потока вокруг сердечника. Назначение любого электромагнита – привести в движение подвижную часть магнитопровода. Таким инструментом служит якорь, который и передает механические усилия рабочим узлам оборудования.
Постоянные магниты выполняются из магнитотвердых материалов (прецизионных сплавов), обладающих высокой остаточной магнитной индукцией. Их характерная особенность заключается в способности сохранять длительное время состояние намагниченности. Магнитотвердые изделия бывают разной формы и являются автономными источниками (не потребляющими энергии) магнитного поля. Относительно способа установки магнитов СД делятся на электродвигатели с поверхностным и встроенным расположением магнитных элементов. Электромагниты, как следует из самого названия, связаны с электрическим током. Это устройство состоит из ферромагнитного сердечника и обмотки, которая, находясь под напряжением, инициирует возникновение магнитного потока вокруг сердечника. Назначение любого электромагнита – привести в движение подвижную часть магнитопровода. Таким инструментом служит якорь, который и передает механические усилия рабочим узлам оборудования.Основные виды и их отличия
Основное отличительное свойство синхронников состоит в одинаковой частоте вращения ротора и магнитного поля, создаваемого обмоткой статора. В зависимости от расположения роторного механизма электроприводы производятся с размещением якоря внутри статора (стандартный тип электромотора) или с наружным конструктивным исполнение (моторы обращенного типа). Относительно конструкции якоря синхронные машины подразделяются на две разновидности:
Относительно конструкции якоря синхронные машины подразделяются на две разновидности:- явнополюсные – тихоходные моторы со скоростью до 1000 об/мин;
- неявнополюсные – высокоскоростные приводы с оборотами порядка 3000 об/мин.
Принцип действия
Работа синхронника основана на использовании свойств трехфазного тока создавать вращающееся магнитное поле, взаимодействующее с неизменным полем роторного узла. Концепция построения и действия индуктора аналогичны трехфазному асинхронному агрегату. Скоростные характеристики магнитного потока статора пропорциональны частоте питающего напряжения. Переменный ток электроцепей, расположенных в статорной пакете, формирует крутящий момент, который, воздействуя на якорь, заставляет его вращаться. Момент вращения зависит от токовой нагрузки и не зависит от скоростных параметров. Поэтому этот тип привода получил название «синхронный», то есть частота оборотов вала и скорость поля статора одинаковы. Постоянные магниты, как ключевой компонент роторного механизма, являются источником магнитного поля. В процессе вращения с одинаковой скоростью, якорные полюса сцепляются с переменным полем индуктора. По этой причине синхронный двигатель с постоянными магнитами не может самостоятельно запускаться при помощи только питающей сети. Инерционность якоря и высокая скорость поля индуктора вызывают необходимость использования дополнительного приводного устройства для запуска электромотора. С этой целью используют сервоприводы, преобразователи частоты или осуществляют асинхронный пуск посредством демпферных (пусковых) обмоток. Электромагнитные процессы в СДПМ с магнитоэлектрическим возбуждением аналогичны процессам в обычных электромашинах, возбуждаемых электромагнитным способом. Отличие состоит в последствиях, к которым приводит реакция якорного узла. Если в обычных приводах при снятии нагрузки магнитный поток полюсов восстанавливается полностью, то в магнитоэлектрических устройствах реакция якоря при определенных условиях приводит к размагничиванию постоянных магнитов. Для ослабления размагничивания принимают специальные меры, увеличивая поток рассеяния между полюсами за счет изменения конструкции полюсных наконечников. Это снижает полезный поток, но мотор становится более стойким к необратимому размагничиванию реакцией якоря. Также для уменьшения потерь магнитных свойств конструкцию якорного узла выполняют типа «звездочка» или с «когтеобразными» полюсами.Процесс пуска
В режиме пуска, когда ротор неподвижен, магнитное поле индуктора вращается вокруг роторного узла с одинаковой скоростью. В это время за один оборот полярность поля изменяется, и вращающий момент меняется на противоположный. Повторяемость этих изменений зависит от частоты вращения магнитного потока, количества полюсов и равна частоте тока в обмотке статора:f = nо*p / 60 = fсети.
Якорный механизм, обладая значительной массой и моментом инерции, при большой повторяемости изменений моментного параметра не успевает разогнаться и остается в неподвижном состоянии. Поэтому среднее значение пускового момента, развиваемого электродвигателем, равно нулю. Для пуска маломощного СД на роторных полюсах размещается дополнительная короткозамкнутая обмотка. В режиме пуска он работает как асинхронный и под действием асинхронного пускового момента ротор разгоняется. Когда частота вращения приближается к синхронной, включается обмотка возбуждения, двигатель «втягивается в синхронизм» и вращается с одинаковыми оборотами. В период двигательного режима пусковая обмотка не оказывает влияния на работу электромотора. Для запуска мощных СДПМ используют внешние электрические приводы.
В период двигательного режима пусковая обмотка не оказывает влияния на работу электромотора. Для запуска мощных СДПМ используют внешние электрические приводы.Управляющая система
Управление приводной машиной осуществляется автоматизированными устройствами, в качестве которых используются преобразователи частоты или сервоприводы. Также функция управления может быть реализована специальными системами контроля. Основанием для выбора того или иного метода всегда является задача, которую должен выполнять электропривод. На практике применяются следующие способы управления:- синусоидальное – делится на скалярное и векторное;
- трапецеидальное – может быть с обратной связью и без нее.
Основные рабочие характеристики
СДПМ в большинстве случаев выполняют явнополюсными. Об их работе судят по следующим рабочим характеристикам:- cos φ – коэффициент мощности, который равен косинусу сдвига фазы переменного тока относительно приложенного к ней напряжения;
- М – вращающий момент;
- η – коэффициент полезного действия;
- n – частота вращения.
n = 60*f1/p,
где f1 – частота тока статора; p – число пар полюсов статорной обмотки. Вращающий момент равен:М = М0 + М2,
где М0 – момент холостого хода, является постоянной величиной; М2 – полезный момент изменяется пропорционально полезной мощности и равен:М2 = P2/?1,
где P2 – полезная мощность, ?1 – угловая частота. Зависимость коэффициента полезного действия от мощности имеет обычный для всех электромашин характер. КПД практически постоянен в пределах изменения нагрузки от 0,5 P2 ном до P2 ном.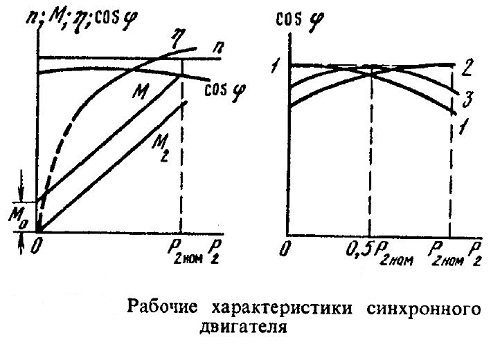 Зависимость частоты вращения электродвигателя от его моментного параметра известна как механическая характеристика электропривода. В зависимости от режима работы она бывает статической и динамической, что соответствует стабильному и переходному рабочему периоду. Механические характеристики СД оцениваются жесткостью. На основании того, что частота вращения роторного узла под нагрузкой не изменяется, синхронные двигатели с постоянными магнитами относят к идеально жестким приводам. Для получения более полной картины поведения электромотора в момент увеличения нагрузки, во внимание принимают угловую характеристику. Этот параметр отражает смещение осей поля статора и ротора при каждом усилии, что выражается формулой:
Зависимость частоты вращения электродвигателя от его моментного параметра известна как механическая характеристика электропривода. В зависимости от режима работы она бывает статической и динамической, что соответствует стабильному и переходному рабочему периоду. Механические характеристики СД оцениваются жесткостью. На основании того, что частота вращения роторного узла под нагрузкой не изменяется, синхронные двигатели с постоянными магнитами относят к идеально жестким приводам. Для получения более полной картины поведения электромотора в момент увеличения нагрузки, во внимание принимают угловую характеристику. Этот параметр отражает смещение осей поля статора и ротора при каждом усилии, что выражается формулой:Mэм = Mmax*sin θ.
Это уравнение является приблизительной зависимостью, характеризующей моментную величину на валу при определенном значении угла вылета ротора. На практике максимальному показателю момента соответствует угол немного меньше 90 градусов.Генераторный режим
Особенность синхронных машин обеспечивать длительно постоянные обороты, а также их обратимость способствует большему распространению в качестве генератора переменного тока. На электростанциях применяют турбогенераторы, у которых в качестве первичного двигателя используют паровые турбины и гидрогенераторы с приводом от гидравлических турбин. Турбогенераторы – быстроходные неявнополюсные агрегаты, устанавливаемые на ТЭЦ горизонтально. Они имеют большую длину при сравнительно малом диаметре. Гидрогенераторы – это тихоходные явнополюсные установки, располагаемые на ГЭС вертикально. Они обладают большим диаметром при относительно малой высоте. Генераторы описываются следующими основными характеристиками:- холостого хода, представляющего собой зависимость Е0 = f (Iв);
- внешними, описываемыми функцией U = f (I);
- регулировочными, характеризуемыми зависимостью Iв = f (I).
Преимущества и область применения
Благодаря освоению производства прецизионных сплавов стало возможным конструировать и успешно применять СДПМ с технологией магнитоэлектрического возбуждения. По сравнению с устройствами на электромагнитах более простая конструкция этого типа электрооборудования обусловила ряд практических преимуществ:- повышенную надежность;
- увеличение коэффициента полезного действия, вследствие отсутствия потерь на возбуждение;
- уменьшение габаритов и массы при повышенных частотах и небольшой мощности;
- возможность автономного использования как генератора увеличенной частоты малой и средней мощности.