Синхронный двигатель реактивного типа – довольно функциональная разработка, позволяющая обеспечивать требуемый уровень мощности и решать задачи, которые не под силу другим типам моторов. Обладают модели своими конструктивными особенностями, которые заслуживают особого внимания. Их мы и опишем. [caption id="attachment_4327" align="aligncenter" width="390"]
Синхронный реактивный двигатель[/caption]
Применение электрических двигателей существенно улучшает показатели развития промышленной и бытовой отраслей, повышает показатели автоматизации производства. На сегодняшний день на рынке представлено множество разнотипных силовых агрегатов, находящих свое применение в разнообразных отраслях деятельности. Сегодня мы поговорим о синхронных реактивных двигателях. Каждый такой мотор – это привычный нам синхронный электрический двигатель, но его момент вращения обусловливается различиями магнитных проводимостей по двум роторным осям: продольной и поперечной. Сам же якорь не обладает постоянными магнитами или намотками возбуждения. Конструктивные особенности
Стационарная часть мотора – статор, комплектуется обмотками двух типов: или распределенного, или сосредоточенного. Также конструкция включает корпус и металлический сердечник, который также включает обмотку. Ротор же представлен сразу в трех модификациях:- с полюсами явновыраженного типа;
- аксиально – расслоенной конструкции;
- поперечно – расслоенный.
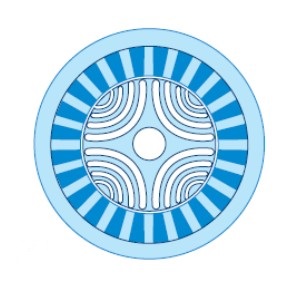
Каждый ротор создает момент вращения посредством уровня магнитного сопротивления. Такой тип электродвигателя относится к агрегатам с индивидуальным возбуждением, и ротор, используемый в этом моторе, является несимметричным. Всего существует несколько вариаций таких силовых агрегатов, но модели синхронного типа действия являются наиболее распространенными. [caption id="attachment_4326" align="aligncenter" width="273"]
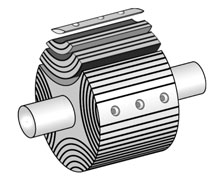
Пример ротора синхронного реактивного[/caption]
Принцип функционирования реактивного мотора
Обмотки статора пропускают через себя ток переменного типа, с помощью чего и создается магнитное поле, которое находится в постоянном вращении в воздушном зазоре мотора. Момент вращения генерируется сразу после того, как роторных компонент начинает устанавливать свою ось, которая будет наиболее магнито проводящей с приложенным полем. На рисунке она отмечается как ось d. Делается это для того, чтобы свести к минимуму уровни магнитного сопротивления в аналогичной цепи. Далее принцип работы подразумевает возникновение моментной амплитуды, которая является прямо пропорциональной разнице двух показателей: поперечной Lq и продольной Ld индуктивностями. Исходя из этого, можно утверждать, что чем выше эта разница, тем больше генерируемый момент. [caption id="attachment_4324" align="aligncenter" width="302"]
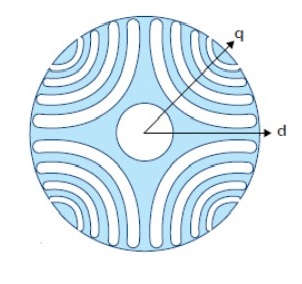
Магнитопроводящие оси[/caption]
Рассмотрим данную ситуацию на примере еще одной схемы. Итак, как можно видеть, на рисунке изображен определенный объект, выполненный из анизотропных материалов, маркируется «а». Он обладает разными показателями проводимости, которые отображены на двух осях: q и d. Объект же b выполненный из изотропного материала с магнетизмом, обладает одинаковыми уровнями проводимости, независимо от направления. Магнитное поле, прикладываемое к объекту «а», генерирует вращающийся момент в ситуации, когда есть угол между линиями магнитного поля и осью d. Если же последняя не будет совпадать с характеристиками магнитных полей, то объект будет всячески искажать само магнитное поле. Стоит отметить, что направленность этих искаженных линий магнитного типа, будет совпадать с траекторией оси q. Синхронный реактивный двигатель генерирует магнитное поле с использованием обмотки статора, распределенной синусоидально. Поле оборачивается с синхронной скоростью и считается синусоидальным. Для обеспечения слаженной работы, необходимо, чтобы всегда был момент, нацеленный на уменьшение полной потенциальной энергии в системе, посредством снижения уровня полевого искажения. Реализуется это на оси q, при условии, что δ стремиться к нулю. Если угол δ будет константным, например, с помощью контроля мощности магнитного поля, то энергия электромагнитной природы, будет на постоянной основе преобразовываться в механическую. [caption id="attachment_4323" align="aligncenter" width="446"]
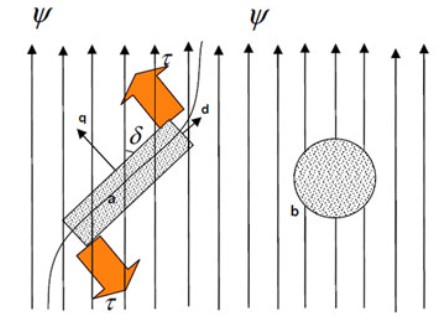
Анизотропная геометрия[/caption]
Статорный ток регулирует намагничивание и генерирование крутящего момента, с помощью которого можно уменьшать искаженность поля. Регулирование момента проводится путем мониторинга токовых фаз, по сути – угла между двум величинами: - осью d ротора в системе координат вращений;
- током статорных намоток.
Диаграмма
Векторная диаграмма синхронного реактивного двигателя включает в себя несколько аспектов. Самая важная характеристика этого двигателя - постоянная скорость. Вначале, если ротор не может подключиться через магнитное поле статора, в этой ситуации на ум приходит демпферная обмотка. Они также используются в двигателях синхронного действия. Размещение данных намоток может выполняться внутри наконечников полюсов, создающих момент демпфирования через несоответствие относительных скоростных параметров ротора или статорного магнитного поля. [caption id="attachment_4322" align="aligncenter" width="309"]
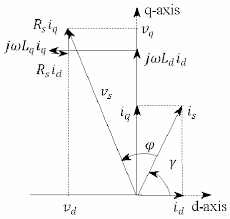
Пример диаграммы фазора[/caption]
Это явление имеет место, когда ротор не срабатывает, тем самым, не обеспечивая подключение через статор. Демпфирующий момент вращения генерируется исходя из физического закона Ленца, согласно которому имеет место несоответствие скоростей движения роторного магнитного поля и непосредственно статором. Крутящий момент демпфирующий осуществляет перемещение намотки ротора таким образом, чтобы она блокировалась через поле статора. Уравнение реактивного двигателя
Ранее мы уже описывали такую характеристику двигателя, как крутящий момент, сейчас давайте же рассмотрим вкратце его уравнение. Оно важно, когда осуществляется проектирование синхронного реактивного электродвигателя, ведь позволяет учитывать все его важные параметры. Вот как выглядит уравнение: [caption id="attachment_4321" align="aligncenter" width="574"]
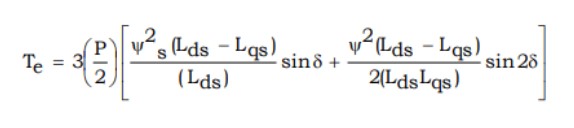
Уравнение[/caption]
Условные обозначения:- Te - момент вращения, максимально возможный;
- P – ситуация отсутствия полюсов;
- Ψ – индуцированное потокосцепление с помощью тока возбуждения;
- Lds – показатель индуктивности согласно прямой оси;
- Lqs – индуктивность оси квадратурности;
- δ – число угла крутящего момента.
Соотношение показателей Ldm/Lqm в реактивных моторах синхронного типа довольно высокое, что обусловливает наличие высокого коэффициента полезного действия. Также, такие силовые агрегаты работают на высоких скоростях, что существенно их выделяет на фоне остальных вариантов исполнения. Высокие отношения между Ldm и Lqm обусловлены применением в процессе разработки анизотропной конструкции. Сильные и слабые стороны моторов
Компоновка реактивных моторов обладает множеством особенностей, которые позволяют выделять агрегаты в новый, самостоятельный вид. Именно эти характеристики определяют сильные и слабые стороны двигателей. К преимуществам относят:- простота и надежность конструкции ротора, которая включает элементы, изготовленные из электротехнической стали тонколистового литья. Магнитов и короткозамкнутой обмотки нет;
- низкий уровень нагрева даже при интенсивной эксплуатации. Токи в якоре отсутствуют, таким образом, просто нет факторов, которые бы усиливали нагрев и, следственно – сокращали срок применения;
- отсутствие необходимого уровня возбуждения поля при наличии нулевого момента вращения, что обусловливает полное отсутствие потерь в электромагнитных вращениях;
- отсутствие магнитов. Данный фактор позволяет снижать общую стоимость устройства, без снижения продуктивности. Затраты на обслуживание и содержание, также сокращаются;
- снижение момента инерции ротора. Данный показатель существенно ниже из-за того, что конструкция ротора не предусматривает наличия ни магнитов, ни обмотки. Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию;
- отсутствие такого явления, как размагничивание. Обусловливается оно вышеуказанным отсутствием магнитов. Особенно выгодно это преимущество по отношению к агрегатам, конструкция которых включает постоянные магниты;
- регулирование скорости. Исходя из того, что для максимально полной эффективности работы синхронного реактивного двигателя нужно установить частотный преобразователь, в моторе есть функция управления скоростями оборотов в широких диапазонах.
Применение такого силового агрегата экономически выгодное и довольно простое в сервисном обслуживании. [caption id="attachment_4325" align="aligncenter" width="300"]
Статор и ротор в разрезе[/caption]
Недостатки:- реализованное только управление частотного типа. чтобы осуществлять точное управление необходимо дополнительно установить частотный преобразователь;
- низкие коэффициенты мощности. Обусловливается тем, что генерирование магнитного потока осуществляется при помощи реактивного тока. Решить этот вопрос можно, опять же, применив преобразователь частоты напряжения.
Сферы использования
Моторы реактивного способа действия довольно широко распространены в хозяйственной отрасли. Вот основные области применения:- маломощное текстильное оборудование. Здесь ключевой фактор при выборе – низкая стоимость, прочность конструкции, простота устройства;
- приложения, в которых требуется наличие постоянной скорости: таймеры, фонографы, управленческие устройства, приборы записи и др.;
- в дозирующем оборудовании, конвейерах, насосах;
- в регуляторах, поворотных механизмах, оборудовании для изготовления синтетических волокон;
- упаковочных машинах, вспомогательном оборудовании;
- при производстве изделий из сплошных листов (металла, например), пленочного материала.
Выводы
Применение двигателя данного типа обеспечит не только высокую продуктивность и защищенность управляемого оборудования, а также хорошие экологические и экономические показатели. Немаловажную роль в этих преимуществах играет отсутствие магнитов, применение которых обусловливает свои особенности, в частности необходимость регулярной замены. Такие модели реактивного типа обладают параметрами, характерными другим видам, например, простотой компоновки асинхронных агрегатов и высоким КПД синхронных устройств. Несмотря на сильные стороны, приборы не лишены недостатков, но, преимущества перекрывают их, делая приобретение синхронных реактивных двигателей выгодной инвестицией. https://youtu.be/q_K9HJzL5wc

