В статье мы рассмотрим, что представляют собой синхронные двигатели с использованием постоянных магнитов. Изучим их особенности и принцип работы в различных условиях. Также разберем, как и с помощью чего может выполняться запуск синхронного двигателя. 
Современное производство комплектуется большим количеством разнообразных электродвигателей. Наиболее распространенной разновидностью принято считать асинхронные модели, постепенно вытесняющие остальные подвиды. Однако есть тип моторов, которые все еще активно применяются и не собираются уступать асинхронникам. Это синхронные двигатели с возбуждением от постоянных магнитов. О них и пойдет речь в данной статье.
Устройство агрегата
В основе данной разновидности двигателя лежит стандартное сочетание – подвижный ротор и неподвижный статор. В классическом исполнении роторная часть располагается внутри статорной, однако есть модели и с обратным расположением. Они называются электродвигателями обращенного типа.
Роторная часть
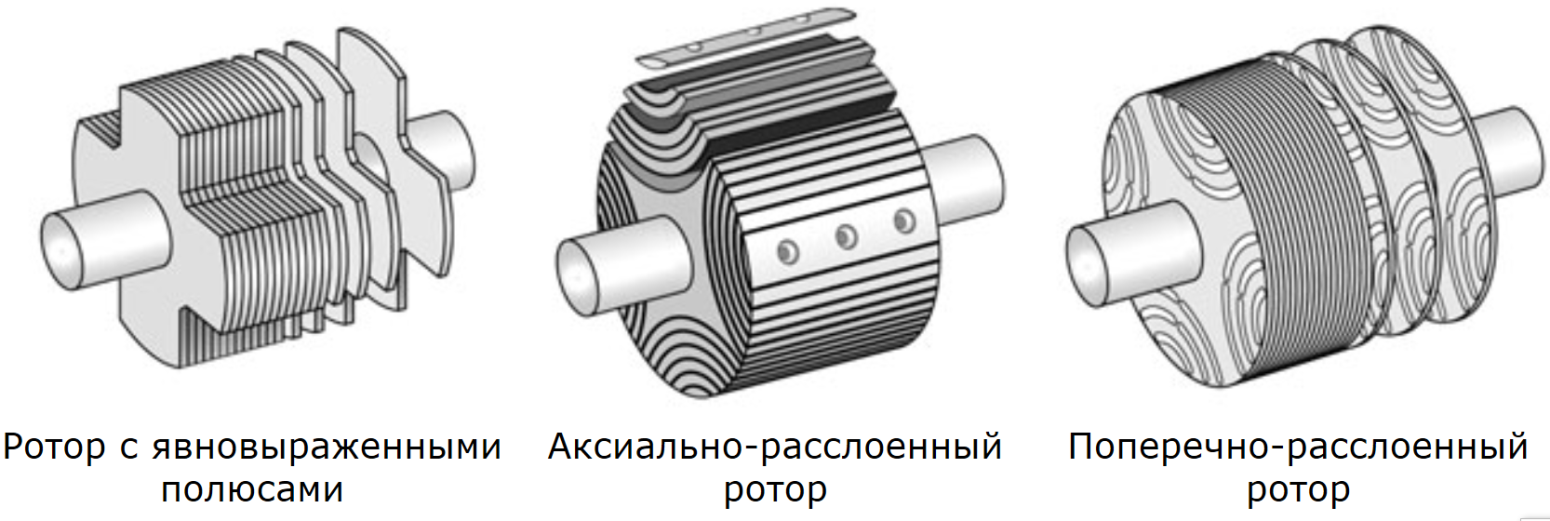
В обсуждаемом типе моторов вращающийся элемент собирается на основе постоянных магнитов. Для магнитной части применяют материалы с высокой коэрцитивной силой. Конструктивно ротор в синхронном двигателе может быть 2 типов:
- Явнополюсный, с различными показателями поперечной и продольной индуктивности. Обмотки в таком исполнении располагаются на полюсах сердечника. Каждый из них становится отдельным элементом, со своим сердечником, катушкой, наконечником. Фиксацию производят на ободе, монтируемом на вал.
- С неявно выраженными полюсами, где показатель индуктивности по обеим осям имеет одну величину. Неявнополюсная модель изготавливается в цилиндрической форме с продольными пазами. В них производится укладка обмотки возбуждения. Цилиндр может быть един с валом в кованом факторе или же напрессованной на вал деталью. Во избежание повреждения провода в процессе работы, концы ротора прикрывают немагнитной сталью. Применяется на высоких оборотах под действием значительной центробежной силы. Может иметь 2 или 4 полюса.
Магниты в конструкции могут быть установлены двумя способами – поверхностным и встраиванием.
Статор

Данный элемент является неподвижным и состоит из корпусной части и сердечника с обмоткой. Чаще всего встречаются обмотки двухфазного и трехфазного типа. Сердечник собирается из отдельных листов металла (электротехнической стали), изолированных между собой. Пазы сердечника предназначены для прокладки обмоточного провода. Общая конструкция статора синхронного мотора схожа с асинхронными моделями. Конструктивно статорная часть может иметь несколько исполнений. Она может производиться цельной или сегментарной, сборной. В случае с большими корпусами, их делают разъемными, разделяющимися вдоль оси ротора на 2 половины. Это значительно упрощает любые операции с агрегатом – транспортировку, ремонтные работы, установку и обслуживание. При малых габаритах корпус выполняется цельным, а в него запрессовывается статор.
Принцип работы
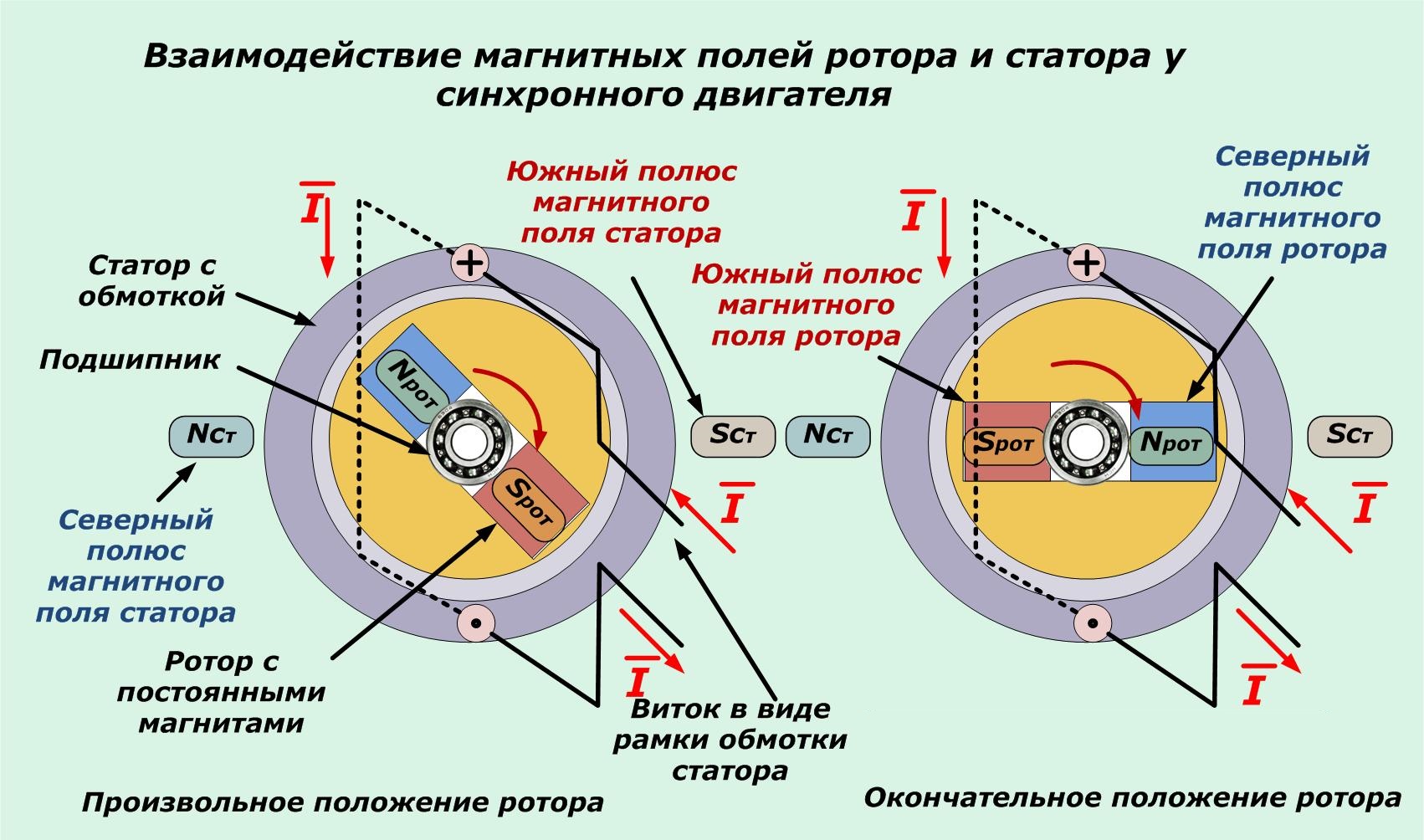
Движение роторной части основано на взаимодействии магнитного потока, который генерируют обмотки статорного элемента, с постоянным потоком. Для формирования магнитного поля ротора может использоваться обмотка с подачей постоянного напряжения, или же магниты. В таком случае оборот статорного поля происходит за период, а ротор движется вслед за ним в силу постоянного магнитного потока. Движение производится синхронно, управляемое сменой амплитуды ЭДС в обмотках. Статорные обмотки могут быть разной сложности исполнения, однако функция у них неизменна – они создают направленное в нужную сторону электромагнитное поле. При взаимодействии с постоянным полем роторных магнитов, оно создает крутящий момент, вследствие чего роторная часть начинает вращаться. Происходит сцепление полюсов с полем статора, из-за чего при подключении напрямую в сеть переменного трехфазного тока вращение не начинается, необходимы дополнительные управляющие узлы.
Управление СДПМ

В качестве управляющей системы синхронного двигателя с ротором, оснащенным постоянными магнитами, может использоваться частотный преобразователь или сервопривод пуска. Способы контроля запуска при этом могут быть разнообразны, выбор зависит от поставленных задач. Управление бывает синусоидальным и трапецеидальным. Эти 2 вида имеют свои подвиды, с собственными преимуществами и недостатками:
- Скалярное. Одна из наиболее простых схем. При этом она чувствительна к смене нагрузки, что приводит к потере управляемости.
- Векторное полеориентированное. Может быть реализовано с датчиком положения и без него. Достоинства его в обеспечении плавности и точности установки положения ротора. Делает работу двигателя более стабильной, позволяет производить регулировку. Минусом таких конструкций является необходимость в мощном микроконтроллере управления.
- Векторное прямое. Достаточно простая схема, имеющая хорошие динамические показатели. Позволяет производить регулировку в широком диапазоне. Недостаток в высоких пульсациях тока и момента.
- Без обратной связи. Как и все трапецеидальные способы управления, обладает простой схемой. Этот момент создает и негативные моменты – управляемость может быть потеряна при смене сопротивления (нагрузки на вал).
- С обратной связью на датчиках Холла. Удобная и несложная система. Минус в необходимости приобретения и установки датчиков. Также возможна пульсация момента.
- Обратная связь без датчиков. Схема работает и применяется во многих двигателях, однако требует мощной управляющей системы. Также неэффективна на низких оборотах и может создавать пульсации момента.
Простейшие конструкции мотора (кулер компьютера) комплектуются датчиками Холла, не имеющими высоких требований. Если же необходимо формирование системы для достижения максимальных характеристик, чаще всего используют полеориентированные схемы.
Полеориентированное управление
Способ позволяет осуществлять плавное, точное и независимое регулирование скорости и момента бесщеточного мотора. Чтобы система исправно работала, нужно определить точное положение ротора. Выполняется это одним из 2 доступных способов – по датчикам положения или без них. В конструкции синхронного двигателя могут использоваться такие типы датчиков:
- индуктивные, включая синусно-косинусные вращающиеся трансформаторы, редуктосин, индуктосин и подобные;
- оптические;
- магнитные.
Основным элементом последнего типа являются магниторезистивные датчики, способные точно определить положение ротора в магнитном поле. Если остановиться на бездатчиковом способе, он основан на векторном управлении. Данная технология начала разрабатываться еще в 1970-х годах. Первые методы основывались на свойстве электромотора генерировать обратную ЭДС при движении. Именно она и содержит в себе необходимую информацию, по которой можно произвести расчет положения роторной части двигателя. Используется стационарная система координат. Однако данная методика имеет большой минус – ее нельзя применять при неподвижном роторе и на низких оборотах. Причина в отсутствии или минимальных показателях обратной ЭДС, теряющихся в общем шуме. Системы управления могут использовать 2 способа запуска двигателя:
- Скалярный. Пуск выполняется по заранее определенной характеристике зависимости напряжения от частоты. Метод действенный, однако, вводит свои ограничения на возможности управляющей системы и общие параметры электропривода.
- Высокочастотный сигнал. Используется метод наложения. Эффективен только с агрегатами, имеющими явновыраженные полюса.
Полнодиапазонное управление скоростью синхронного мотора без датчиков определения положения в современном производстве применяется только с явновыраженными полюсами ротора.
Отличие от асинхронного двигателя
Главным различием между асинхронными и синхронными двигателями заключается в способе преобразования электрической энергии в механическую:
- синхронные модели вращаются аналогично электромагнитному полю сети;
- асинхронные агрегаты работают за счет наведенной статорным полем в роторе ЭДС, производящей взаимоиндукцию и приводящей к вращению.
Особенность работы несинхронных полей выражается в особом параметре – скольжении, которое характеризует разницу в частоте статорного и роторного полей. Асинхронники при своей популярности обладают рядом недостатков:
- чувствительность к перегрузкам;
- высокие пусковые токи;
- нестабильность крутящего момента при изменении нагрузки.
Все эти факторы отсутствуют у линейных синхронных двигателей, будь то с обмоткой возбуждения или постоянными магнитами.
Область применения СДПМ

Сфера использования синхронного двигателя с постоянными магнитами достаточно обширна, и зависит во многом от мощности агрегата. Мощные конструкции в режиме генератора применяются на бортах самолетов в качестве системы питания. При этом они могут выдавать до нескольких десятков киловатт. При меньшей мощности двигателя его широко применяют в конструкции автомобилей, тракторов, самолетов. Причина такой популярности в высокой надежности и стабильности. Также используются СДПМ и в мелкой бытовой технике.
Способы запуска маломощных моделей
Конструкции малой мощности на основании постоянных магнитов могут запускаться в работу двумя способами – самозапуск и асинхронный пуск. Каждый метод имеет свои особенности.
Самозапускающиеся СДПМ
Данный метод используется с системами, имеющими малую номинальную мощность, не превышающую несколько ватт. Чтобы упростить запуск, мотор выполняется в многополюсном факторе (количество полюсов превышает 8). Питание подается от однофазной сети с промышленной частотой. Пуск осуществляется за счет синхронного момента при взаимодействии пульсирующего поля с постоянными магнитами ротора. Для контроля и направленности запуска используют специальные механические направляющие механизмы, позволяющие производить вращение только в одну сторону. Во время синхронизации ротор отсоединяется от вала.
Асинхронный запуск
Модели данного типа изготавливают с радиальным расположением постоянного магнита и пусковой обмотки короткозамкнутого вида. Также возможно аксиальное расположение данных элементов. Конструкция статора моделей аналогична системам с электромагнитным возбуждением. При радиальном расположении короткозамкнутая обмотка располагается в пазах полюсных наконечников магнита. Чтобы получить допустимые потоки рассеивания, наконечники соседних полюсов разделены немагнитными промежутками. Для повышения прочности эти элементы могут объединяться в единый сердечник. Аксиальное расположение подразумевает, что активная длина частично занята постоянным магнитом. Другая часть отведена под шихтованный магнитопровод с обмоткой короткозамкнутого типа. При этом обе части располагаются на одном валу. В процессе запуска на ротор одновременно воздействует положительный асинхронный момент (взаимодействие вращающегося поля с индуктированными токами обмотки), а также отрицательная величина, обусловленная взаимодействием постоянных магнитов с полями в статорной обмотке. https://youtu.be/LLwcpfUjl44