Асинхронные электродвигатели представляют собой полноценные системы, качество работы которых определяется техническими характеристиками. Для чего они нужны и каким образом измеряются и изменяются, мы опишем далее. Параметры двигателя – первое, что необходимо знать перед началом его эксплуатации. [caption id="attachment_4136" align="aligncenter" width="368"]

Асинхронный двигатель[/caption]
Для того, чтобы обеспечить нормальную слаженную работу асинхронных силовых агрегатов, необходимо знать все об этих моторах, в частности, их рабочие и механические характеристики. Это необходимо, как при покупке компонентов в магазине, так при реализации их своими руками. Также, при помощи правильного регулирования этих показателей, вы сможете успешно управлять работой двигателя, обеспечивая не только высокую продуктивность, но и снижение энергозатрат. Общие параметры
По умолчанию, стандартная машина асинхронного типа (без доработок и модификаций) включает 2 основных компонента: - статор – неподвижную деталь;
- ротор – деталь, поддающаяся вращениям.
В трехфазных моделях 3 отдельные фазы представляют собой статорную обмотку. С1, С2, С3 на рисунке – это их начало, а С3, С4, С5 – концы. Абсолютно все они подключаются к клеммным разъемам, с использованием одной из двух схем: «звезда» или «треугольник». На изображении их можно видеть под вариантам Б и В. [caption id="attachment_4184" align="aligncenter" width="424"]
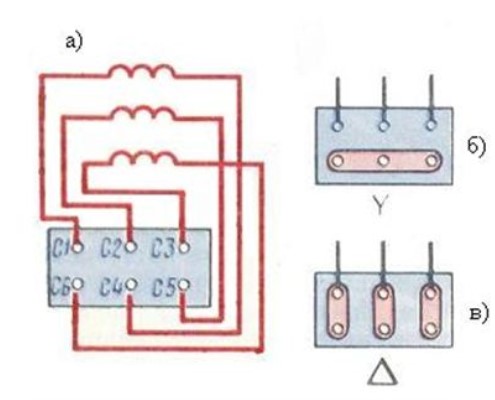
Схема устройства асинхронного мотора[/caption]
Конкретная схема для построения, выбирается с учетом паспортных данных электродвигателя и показателей сетевого напряжения, от которого будет производиться питания. Основная задача статора – создание магнитного поля внутри мотора, которое бесперебойно вращается. Ротор же бывает двух видов – фазный и короткозамкнутый. Последний имеет скорость оборотов, которая не поддается регулированию. Применение такого компонента в силовом агрегате делает конструкцию проще и дешевле. Момент запуска у таких устройств, правда, низкий, чего не скажешь о моторах с ротором фазным. У него скорость вращения управляется при помощи ввода вспомогательного сопротивления. Принцип действия мотора
Первое, что осуществляется – на статорную обмотку подается электрическое напряжение. По каждой отдельной фазе можно видеть постоянно меняющиеся магнитные потоки, смещенные по отношению друг к другу на угол 120 градусов. В результате получается общий результирующий поток, который также вращаемый, а с его помощью создается электродвижущая сила внутри роторных проводников. Именно так в результате получается ток, который совмещается с потоком результирующим, что создает момент пуска. А он в свою очередь приводит ротор в движение. Это общее, упрощенное описание принципа действия силового агрегата с разными скоростями оборотов. Для того, чтобы рассмотреть работу мотора, стоит углубиться в механические и рабочие характеристики, точно влияющие на вышеописанный алгоритм срабатывания. Механическая характеристика
Суть данного параметра состоит в прямой зависимости частоты оборотов ротора от показателей нагрузки. То есть, от момента вращения на валу. Когда нагрузка находится на номинальном уровне, то частота вращений для разнотипных моторов варьируется в диапазоне от 92,5 до 98% от частоты оборотов n1. Скольжение (Sном) при этом не превышает уровень в 2 – 7,5%. [caption id="attachment_4183" align="aligncenter" width="907"]
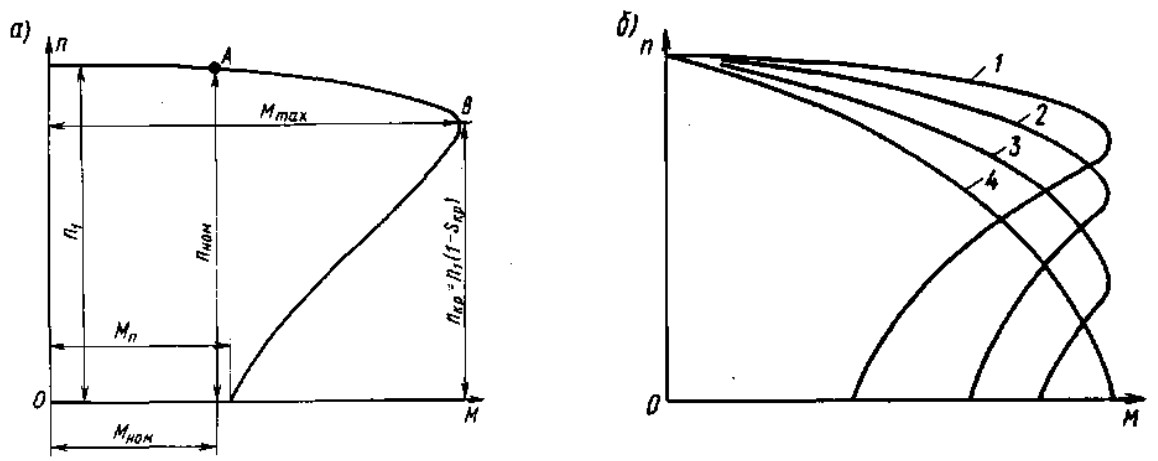
Механическая характеристика[/caption]
Чем выше уровень нагрузки, с которой работает мотор, тем ниже частота оборотов электрического мотора. Частота оборотов асинхронного двигателя несущественно снижается при усилении нагрузки в пределах от нуля до максимального значения. Визуально это можно видеть выше, на рисунке А. из этого следует, что электрический агрегат относится к моторам с жесткой механической характеристикой. М макс., то есть наибольший крутящий момент, агрегат развивает, когда имеется определенное скольжение (Skp), который находится на уровне от 10 до 20 процентов. Соотношение величин Ммакс и Мном указывает на перегрузочную способность мотора. Отношение же Мп к М номинальному, указывает на пусковые качества электродвигателя. Электрический мотор способен стойко и бесперебойно работать при условии обеспечения самостоятельного регулирования, когда будет автоматически установлено равновесие между моментом нагрузки, нацеленным на вал (Мвн) и М моментом, который развивает непосредственно двигатель. Это условие отлично отображается на верхней части характеристики, при достижении максимального показателя М. Другими словами - до уровня точки В. В ситуациях, когда момент нагрузки М превышает показатель М макс., то мотор имеет сниженную устойчивость и останавливается. Параллельно с этим по машинным обмоткам будет довольно долго подаваться ток в несколько раз выше номинального, что может привести к перегоранию. Температура деталей растет, из-за превышенного электричества. https://youtu.be/3nVRzfv6ogw
При подключении в электрическую цепь роторных обмоток от пускового реостата, на выходе мы получим полный набор механических характеристик. Первый параметр при эксплуатации мотора без стартового реостата, называют естественной характеристикой. Второй, третий и четвертый показатель, которые получаются при подсоединении к роторной обмотке двигателя реостата, обладают сопротивлениями R1п (2п и 3п соответственно), относятся к механическим характеристикам реостатного типа. Когда же проводится запуск пускового реостата, механическую характеристику называют мягкой или крутопадающей. Это обусловливается тем, что существенно возрастает показатель активного сопротивления роторной цепи R2 и увеличивается Sкр. Параллельно с этим снижается ток запуска. Данная величина (Мп) также регулируется R2. При этом, существует возможность подобрать реостат с определенным сопротивлением, для того, чтобы момент пуска (Мп) равнялся максимальному М. Электромеханическая характеристика
Показатель является зависимостью угловой скорости оборотов от статорного тока. При использовании сразу нескольких опорных точек можно создать такую характеристику. Для этого проводят расчет таких величин: [caption id="attachment_4182" align="aligncenter" width="526"]

Пример вычисления[/caption]
[caption id="attachment_4181" align="aligncenter" width="450"]

Вычисление[/caption]
- уровень тока в начальные моменты старта.
[caption id="attachment_4180" align="aligncenter" width="474"]

Начальный момент пуска[/caption]
Все эти значения максимально точно отображают электромеханическую характеристику. Рабочие характеристики
Данные параметры указывают на зависимости от полезной мощности Р2 = Р макс. таких показателей:- частот вращений (n) или скольжения (S);
- валового момента (М2);
- статорного тока I1 ;
- КПД (коэффициента полезного действия).
[caption id="attachment_4179" align="aligncenter" width="598"]
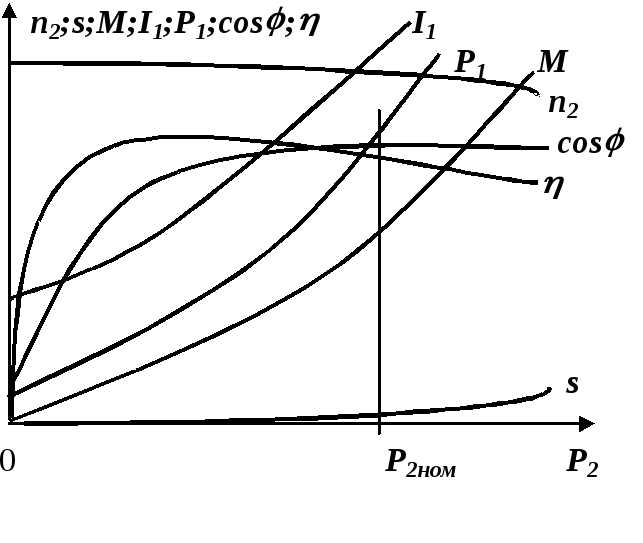
Рабочие характеристики[/caption]
При этом значения частоты f1 и напряжения U1 должны быть на номинальных уровнях. Они реализуются для областей устойчивого срабатывания мотора. Это означает, что диапазон должен быть от нулевого скольжения до того, которое превышает номинальное на 10 – 20%. Частота оборотов при растущей отдаваемой мощности мало поддается изменениям. Это уже можно было видеть в механической характеристике, тогда, когда валовый момент М2 пропорциональный показателю мощности Р2. Крутящий момент ниже, чем электромагнитный момент, разница представляет собой значение момента торможения Мтр, который генерируется силами трения. Статорный ток I1 увеличивается вместе с отдаваемой мощностью, но, когда показатель Р2 равен нулю, присутствует определенный ток для работы на холостых оборотах – I0. Уровень КПД также снижается, практически идентично, как у трансформатора, сохраняя довольно-таки высокое значение, в относительно широком спектре нагрузок. Наибольший коэффициент полезного действия для асинхронных силовых агрегатов со средними и большими мощностями, варьируется в пределах 0,75 – 0,95. Чем выше мощность машины, тем больше у нее КПД. Мощностной коэффициент косинус ϕ1 у асинхронных моторов аналогичных характеристик при наличие максимальной нагрузки составляет 0,7 – 0,9. Исходя из этого, можно видеть, что силовые агрегаты перегружают электрические подстанции и сети питания своими довольно внушительными токами, которые могут достигать от 40 до 70% от номинальных токов. Это – один из самых весомых недостатков установок такого типа. Если же моторные нагрузки на порядок меньше, например 25 – 50% от рабочих, то мощностной коэффициент падает до недостаточных значений – 0,5 – 0,75. Когда осуществляется снятие нагрузки с мотора, коэффициент мощности уменьшается еще и новые показатели составляют 0,25 – 0,3. Именно поэтому нельзя допускать, чтобы асинхронный двигатель функционировал длительное время на холостых оборотах, а также при существенных недогрузках. Работа на пониженных напряжениях или с обрывами фаз
Сниженное напряжение в питающей сети существенно не влияет на показатели частоты оборотов роторных элементов асинхронного мотора. При этом также уменьшается показатель наивысшего крутящего момента, который позволяет развить ресурс мотора. К примеру, когда происходит понижение на 30%, момент вращения сокращается приблизительно в два раза. Это обусловливает то, что когда напряжение падает несущественно, мотор может остановиться, а при низком – не запуститься. На эквивалентное последовательное сопротивление (Э.П.С) переменного тока питания при снижении напряжения в сети контактного типа параллельно снижается уровень напряжении в сетях с тремя фазами. От таких источников питаются двигатели асинхронного типа, которые приводят в движение вспомогательные компоненты производственного оборудования: гидравлические и пневматические насосы, компрессорные установки, вентиляторы и др. Для обеспечения нормальной работы моторов на пониженных уровнях напряжения (их рабочий процесс должен осуществляться без сбоев при падении напряжения до 0,75 U ном), величины мощности должны быть с определенными показателями. Эти данные сводятся к тому, что мощности всех вспомогательных компонентов на Э.П.С берутся с показателями, приблизительно в полтора раза большими, чем требуется для приведения их в действие с номинальным напряжением. Такой высокий запас ресурса необходим через наличие несимметрии напряжений фазного типа. Это обусловливается тем, что на последовательном сопротивлении, двигатели питаются от фазного расцепителя, а не от генератора на 3 фазы. Асимметричность напряжений обусловливает различия в напряжениях фазовых токов, а также сдвиги между ним, которые не будут иметь углы в 120 градусов. Такое явление обусловливает то, что по одной фазе будет подаваться ток с более высокими показателями, что вызовет нагрев намоток этой же фазы. Чтобы этого не возникало, необходимо ограничивать нагрузку на мотор, сравнительно с его работой при напряжениях симметричного типа. [caption id="attachment_4185" align="aligncenter" width="372"]
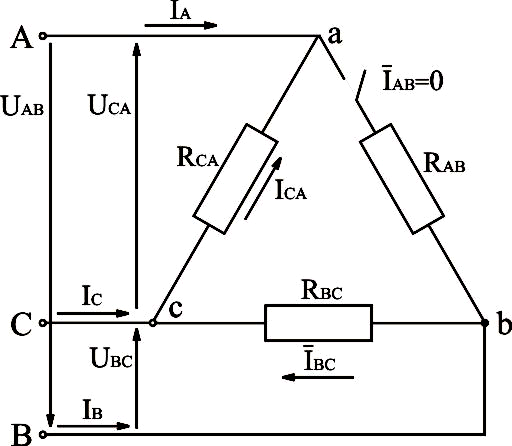
Пример обрыва фаз[/caption]
Обрывы фаз также имеют место в работе асинхронного двигателя. При возникновении такой ситуации мотор работает и дальше, но, при этом, по целым фазам будут идти токи на повышенных уровнях. Это в свою очередь также вызовет нагрев катушек, из-за чего функционирование в таких режимах не допускается. Запуск агрегата с поврежденными обмотками невозможен, что обусловливается недостаточным магнитным полем, которое не приведет в движение ротор. Когда в контактной части количество оборотов уменьшается то, как правило – подача вспомогательного оборудования остается неизменной. В моторах постоянного тока, частоты оборотов прямо пропорциональны напряжению питания, исходя из этого, подача машин меняется. https://youtu.be/HsublgZ1q-M

