Потери и КПД асинхронного электрического двигателя
На чтение 5 минОпубликованоОбновлено
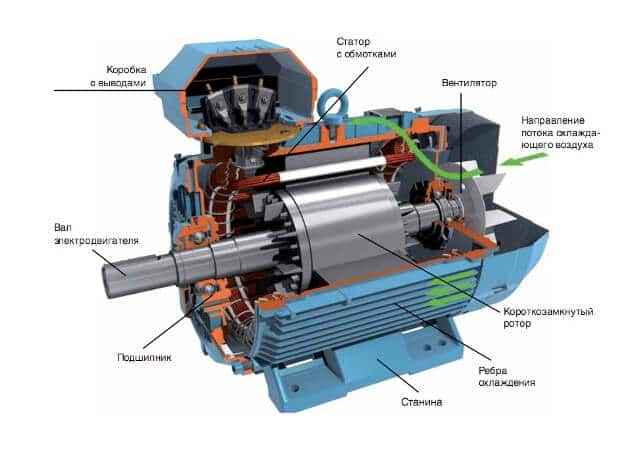
Во время превращения одной энергии в другую в электродвигателе в виде теплоты неустанно рассеивается их часть. Это и называется потерей. Потери могут быть фиксированными и переменными, а также делятся на еще несколько подвидов. [caption id="attachment_4359" align="aligncenter" width="631"] Асинхронный двигатель[/caption]
Постоянные потери асинхронной машины
Трехфазный асинхронный электропривод переменного тока может иметь два вида потерь:
Постоянный вид.
Переменный вид потерь.
Фиксированные – это те, что не изменяются, если электромотор работает полностью исправно и с нормальной нагрузкой. Их можно получить и в результате холостого прогона агрегата. Они делятся на еще три подвида потерь:
В стали (а еще железа или сердечника).
Механические.
Расходы при трении щеток.
В стали
Такой вид потерь в стали, в свою очередь, может быть гистерезисным или расходом вихревого электротока. Второй типа можно эффективно минимизировать, если использовать наслоение на сердечник. С применением наслоения сокращается участок, что ведет к увеличению сопротивления, а значит сокращение вихревых токов неизбежно.Первый же тип, гистерезисный, уменьшают, пользуясь высококачественной сталью, в составе которой есть кремний. Почему? Любая потеря связана с частотой напряжения, поступающего в двигатель. Статорная частота всегда подающая, обозначается как f, а вот частотность якоря – это проскальзывание s. Оно умножается на подающую (sf). Якорная частота, в асинхронной машине, надо заметить, всегда будет ниже статорной.Показатель подающей частоты равен 50 Гц, а вот якорная составляет приблизительно 1,5 Гц. Так получается по той простой причине, что величина проскальзывания равна лишь 3% для нормального рабочего состояния привода. Поэтому и расход в роторе относительно малы, в сравнении с потерей в статоре. Потерями роторного сердечника, обычно, можно спокойно пренебречь.
Механический тип потерь. Трение щеток
Механический вид – это расходы, возникающие в подшипниках, а трения щеток имеют место во всех асинхронных электромоторах, ротор которых обмотан. При запуске машины они являются нулевыми. С увеличением скорости работы агрегата, они тоже растут. В трехфазном движке скорость принимает определенное значение и не меняется на протяжении всего рабочего цикла. Поэтому и данные потери в нем всегда будут постоянными.
Переменный вид потерь
Другое название – расходы меди. Появляются они из-за того, что электроток идет по статорным и роторным обмоткам. При смене нагрузки на движок, электроток тоже меняет значение, что ведет и к изменению величины потерь меди. Это и послужило источником их названия. Получить их можно, если провести тест трехфазного агрегата при заблокированном роторе.Главная задача асинхронной машины заключается в преобразовании электроэнергии в механическую силу. Пока происходит такая трансформация, одна энергия становится другой, она проходит несколько разных этапов. Эту проходящую ступени преобразования энергию можно изобразить с помощью диаграммы. [caption id="attachment_4367" align="aligncenter" width="471"] Энергетическая диаграмма двигателя[/caption] Частично двигатель использует ее, чтобы поддерживать статорные расходы: стали и меди. Та часть, которая остается сохранной, поступает к якорю в качестве входа на ротор.Из этого следует, что вход на ротор равен статорным потерям (P2 = Pin). Теперь сохранившаяся входная энергия должна пройти преобразование и стать механической. Однако, механическим выходом она стать не может, так как он поддерживает потери. Как мы уже поняли, роторные потери можно разделить на две группы: меди и железа. Последние ничтожно малы, настолько, что ими можно пренебречь. Это связано с тем, что они зависят от роторной частоты, а она составляет примерно 1,5 Гц.Следуя из вышесказанного, можно смело утверждать, что ротор обладает лишь потерями меди. Так вот, после именно ее поддержки не преобразованная часть электроэнергии, которая осталась становиться механической. Ее обозначают как Pm. После всего этого, новопреобразованая сила отправляется на нагрузку, чему помогает вал. Но на этом этапе неизбежны уже механические расходы. В их число входит трение и сопротивление в воздухе. Поэтому общая механическая энергия, которая воспроизводиться в электродвигателе обязательно уходит, чтобы поддерживать эти потери.Так что образованная в итоге энергия отправляется на вал мотора. Ее, в конце концов, подают нагрузке. Обозначается это как Pout. Она носит название энергии вала или, по-другому, полезная.Pout это и есть механические потери Pm. Они связаны с сопротивлением в воздухе и трением.
Потери мощности и КПД в трехфазном приводе переменного тока
Итак, потери в двигателе могут механическими, магнитными или электрическими.От питающей сети на статорную обмотку происходит подача мощности Р1. Одна ее часть идет в расход, чтобы покрыть магнитные потери в статорном сердечнике рс1. Используется она и в статорной обмотке, чтобы поддержать электропотери из-за нагретой намотки.Вся та мощность, которая осталась, магнитным поток подается к ротору. Из-за этого она и называется электромагнитной. Эта оставшаяся электромагнитная мощность превращается в механическую. Последняя носит название полная «механическая мощность электрического привода». Мощность роторных электропотерь имеет прямую зависимость от скольжения, поэтому асинхронная машина будет работать тем экономичнее, чем меньше будет составлять величина скольжения.Последнее по очереди, но не по важности – возникновение магнитных потерь. Они тоже возникают в подвижном элементе электромотора, но небольшая электротоковая частота (f2 = f1s) делает их настолько малыми, что ими также можно пренебречь. Трение частей системы, которые вращаются, о воздух, а также трение, происходящее в подшипнике обуславливает появление механического расхода. Поля рассеяния наряду с пульсациями в статоре и якоре становятся причиной добавочного вида потерь.Из всего, что сказано выше, можно собрать формулу общих потерь. Она приведена ниже:∑р = рс1 + рэ1 + рэ2+ рмех + рд
КПД асинхронной машины
Так как коллектор в двигателе отсутствует, коэффициент полезного действия электроприводов такого типа выше, чем у их «собратьев», питающихся постоянным током. Величина мощности АД прямо влияет на коэффициент. Если нагрузка на агрегат нормальная, то он может составлять до 95%. https://www.youtube.com/watch?v=RP2RsJ_nFCY

 Асинхронный двигатель[/caption]
Асинхронный двигатель[/caption]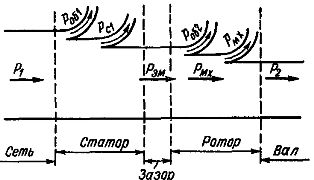 Энергетическая диаграмма двигателя[/caption] Частично двигатель использует ее, чтобы поддерживать статорные расходы: стали и меди. Та часть, которая остается сохранной, поступает к якорю в качестве входа на ротор. Из этого следует, что вход на ротор равен статорным потерям (P2 = Pin). Теперь сохранившаяся входная энергия должна пройти преобразование и стать механической. Однако, механическим выходом она стать не может, так как он поддерживает потери. Как мы уже поняли, роторные потери можно разделить на две группы: меди и железа. Последние ничтожно малы, настолько, что ими можно пренебречь. Это связано с тем, что они зависят от роторной частоты, а она составляет примерно 1,5 Гц. Следуя из вышесказанного, можно смело утверждать, что ротор обладает лишь потерями меди. Так вот, после именно ее поддержки не преобразованная часть электроэнергии, которая осталась становиться механической. Ее обозначают как Pm. После всего этого, новопреобразованая сила отправляется на нагрузку, чему помогает вал. Но на этом этапе неизбежны уже механические расходы. В их число входит трение и сопротивление в воздухе. Поэтому общая механическая энергия, которая воспроизводиться в электродвигателе обязательно уходит, чтобы поддерживать эти потери. Так что образованная в итоге энергия отправляется на вал мотора. Ее, в конце концов, подают нагрузке. Обозначается это как Pout. Она носит название энергии вала или, по-другому, полезная. Pout это и есть механические потери Pm. Они связаны с сопротивлением в воздухе и трением.
Энергетическая диаграмма двигателя[/caption] Частично двигатель использует ее, чтобы поддерживать статорные расходы: стали и меди. Та часть, которая остается сохранной, поступает к якорю в качестве входа на ротор. Из этого следует, что вход на ротор равен статорным потерям (P2 = Pin). Теперь сохранившаяся входная энергия должна пройти преобразование и стать механической. Однако, механическим выходом она стать не может, так как он поддерживает потери. Как мы уже поняли, роторные потери можно разделить на две группы: меди и железа. Последние ничтожно малы, настолько, что ими можно пренебречь. Это связано с тем, что они зависят от роторной частоты, а она составляет примерно 1,5 Гц. Следуя из вышесказанного, можно смело утверждать, что ротор обладает лишь потерями меди. Так вот, после именно ее поддержки не преобразованная часть электроэнергии, которая осталась становиться механической. Ее обозначают как Pm. После всего этого, новопреобразованая сила отправляется на нагрузку, чему помогает вал. Но на этом этапе неизбежны уже механические расходы. В их число входит трение и сопротивление в воздухе. Поэтому общая механическая энергия, которая воспроизводиться в электродвигателе обязательно уходит, чтобы поддерживать эти потери. Так что образованная в итоге энергия отправляется на вал мотора. Ее, в конце концов, подают нагрузке. Обозначается это как Pout. Она носит название энергии вала или, по-другому, полезная. Pout это и есть механические потери Pm. Они связаны с сопротивлением в воздухе и трением.