
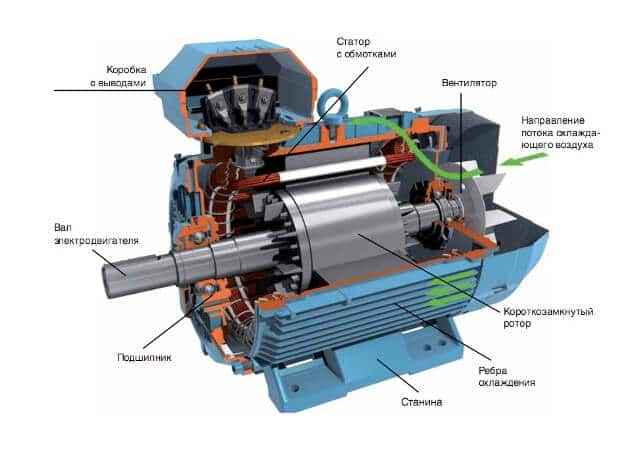
 Асинхронный двигатель[/caption]
Асинхронный двигатель[/caption]Рекуперативный режим торможения
В случаях, когда скорость работы асинхронной машины выше синхронной, для осуществления торможения используют рекуперативный режим. Если говорить ближе к реальности, то применяется такой режим в агрегатах машин, подающих большие грузы( например, в подъемниках и экскаваторах), и там, где переключаются полюса. Когда движок начинает работать в режиме генератора меняется знак момента, а следовательно, и знак активной составляющей якоря. Асинхронная машина начинает отдавать свою активную энергию или мощность сети, а потреблять начинает реактивную мощность. Она нужна для возбуждения. Это может возникнуть, например, во время торможения привода с двумя скоростями при переходе от высокой к низкой скорости. Схематически это изображено на рисунке 1а.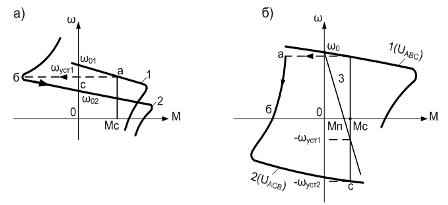 Можно сделать предположение, что изначально мотор совершал работу с характеристикой под цифрой 1, находясь при этом в точке а, а вращение происходило со скоростью ωуст1. Когда количество полюсов увеличилось, электромотор начинает работать на характеристике под номером 2. Отрезок второй характеристики, называющийся бс, соответствует моменту торможения, при котором произошла рекуперация мощности в сеть. Рекуперацию уместно применять и в системе, преобразовывающей чатсоту. Она может быть использована в процессе остановки работы привода или во время перехода от одной характеристики к другой. Для этого частоту напряжения на выходе обязательно снижаются, что приводит к уменьшению синхронной скорости, математически это выглядит так:
Можно сделать предположение, что изначально мотор совершал работу с характеристикой под цифрой 1, находясь при этом в точке а, а вращение происходило со скоростью ωуст1. Когда количество полюсов увеличилось, электромотор начинает работать на характеристике под номером 2. Отрезок второй характеристики, называющийся бс, соответствует моменту торможения, при котором произошла рекуперация мощности в сеть. Рекуперацию уместно применять и в системе, преобразовывающей чатсоту. Она может быть использована в процессе остановки работы привода или во время перехода от одной характеристики к другой. Для этого частоту напряжения на выходе обязательно снижаются, что приводит к уменьшению синхронной скорости, математически это выглядит так:ωо = 2πf / p.
Из-за существования такого явления, как механическая инерция, изменение текущей скорости работы (ω) двигателя будет происходить на порядок медленнее, чем смена синхронной (ωо). Текущая скорость также всегда будет выше, чем скорость магнитного поля. Это и становиться причиной возникновения режима торможения, при котором в сеть отдается энергия. Рекуперацию можно вполне успешно использовать в моторах машин, имеющих дело с грузами, во время их спуска. Чтобы это осуществить, нужно для начала включить движок в направлении спуска (вторая характеристика на рисунке 1б). Когда торможение закончится, он начнет работу в некоторой точке при скорости -ωуст2. В это время груз будет спускаться при отдаче двигателем энергии в сетью. Их всех тормозных режимов наиболее экономически выгодным является именно рекуперативный.Противовключение
Перевести асинхронный электропривод в режим противовключения можно двумя способами. Первый связан со сменой очередности фаз напряжения, что питает двигатель. Итак, двигатель, к примеру, совершает работу при характеристике номер 1 (это показано на рисунке 1б). При этом фазы напряжения АВС чередуются. Если две любые фазы (мы возьмем В и С) переключить, то есть подключить на место друг друга, мотор перейдет к работе со второй характеристикой. Противовключению будет соответствовать участок графика аб. Важно отметить момент того, что во время торможения противовключением, значение скольжения электродвигателя меняется с S=2 на S=1. Вращение ротора в этот момент направлено против вращения магнитного поля, из-за чего скорость работы детали постоянно замедляется. В момент, когда она будет равной нулю, агрегат нужно выключить из сети, потому что машина перейдет в режим двигателя и будет совершать вращение, противоположное предыдущему. Во время режима противовключения обмоточный ток может быть в 7-8 раз выше своего номинального значение (при холостом ходе). Коэффициент мощности также будет заметно снижен. Говорит о коэффициенте полезного действия вообще не смысла. Электроэнергия (образуется из механической), а также мощность, которой электродвигатель питался, исчезают из-за наличия в якоре активного сопротивления. Полезная энергия отсутствует. Двигатели с короткозамкнутым ротором при этом на короткое время становятся перегруженными по току. Только при S>1 величина активного сопротивления обмоток якоря станет значительно больше. Это связано с вытеснением тока. В конечном итоге это приводит к снижению и увеличению момента. Для повышения тормозного эффекта электроприводов, в конструкции которых присутствует фазный ротор, в их якорные цепи вводится добавочное сопротивление. Это ограничивает обмоточные токи и способствует увеличению момента. По-другому торможение посредством противовключения можно использовать во время активного характера нагрузочного момента. Такой момент появляется на валу электромотора в машинах, которые предназначены для подъема грузов. Представим, что нам нужно воспользоваться таким механизмом, чтобы спустить груз. При этом нужно также обеспечить торможение его асинхронного движка. Для этого агрегат нужно перевести на характеристику, схематически изображенную под третьим номером на рисунке выше. Для этого включаем в роторную цепь дополнительный резистор. Момент нагрузки Мс превысит пусковой момент Мп, что приведет к спуску груза со скоростью –ωуст2. При таком торможении скольжение изменится с S=1 на S=2.Режим торможения с помощью подключения к постоянному току
Режим электродинамическое торможения выполняется с помощью включения двух статорных обмоток на выбор в любой источник постоянного тока. Используя группу контактов К1, асинхронной машине сперва нужно выключить питание от трехфазного тока, а потом уже, замкнув группу К2, подать на обмотки постоянный ток. Величина этого постоянного тока регулируется сопротивлением (rт) (показано на рисунке 2). [caption id="attachment_4361" align="aligncenter" width="353"]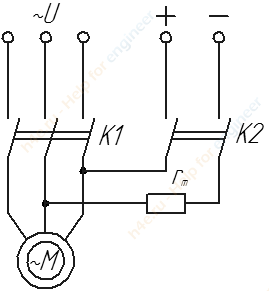 Схема динамического торможения[/caption] Процесс электродинамического торможения невозможен без следующи сопровождающих его процессов и изменений. Во время отключения переменного тока, магнитное поле в статоре, естественно, пропадает. После этого уже подключенный источник постоянного способствует возникновению постоянного магнитного поля. Ротор продолжает работать все так же, по инерции, но только теперь в условиях постоянного магнитного поля. В обмотках якоря возникает электродвижущая сила, с пропорциональной скорости работы машины частотой вращения вала. Ток в якорной обмотке появляется благодаря возникновению уже упомянутой ЭДС. Этот электроток влияет на появление статического магнитного потока (относительно неподвижного элемента движка). Момент торможения создают взаимодействующие статорное магнитное поле и электроток в роторных обмотках. Асинхронная машина их двигательного режима переходит в генераторный. Она начинает преобразование кинетической энергии работающего вала в электроэнергию. Последняя, в свою очередь, превращается в тепловую энергию на якорной обмотке и рассеивается. Переходя в динамическое торможение сравниваются две величины: частота и угловая скорость (f=0 и w0=0). Кривая электродинамического торможения при этом проходит через начало координат. Режим торможения закзанчивает в момент, когда двигатель полность остановится (это можно увидеть на рисунке 3).
Схема динамического торможения[/caption] Процесс электродинамического торможения невозможен без следующи сопровождающих его процессов и изменений. Во время отключения переменного тока, магнитное поле в статоре, естественно, пропадает. После этого уже подключенный источник постоянного способствует возникновению постоянного магнитного поля. Ротор продолжает работать все так же, по инерции, но только теперь в условиях постоянного магнитного поля. В обмотках якоря возникает электродвижущая сила, с пропорциональной скорости работы машины частотой вращения вала. Ток в якорной обмотке появляется благодаря возникновению уже упомянутой ЭДС. Этот электроток влияет на появление статического магнитного потока (относительно неподвижного элемента движка). Момент торможения создают взаимодействующие статорное магнитное поле и электроток в роторных обмотках. Асинхронная машина их двигательного режима переходит в генераторный. Она начинает преобразование кинетической энергии работающего вала в электроэнергию. Последняя, в свою очередь, превращается в тепловую энергию на якорной обмотке и рассеивается. Переходя в динамическое торможение сравниваются две величины: частота и угловая скорость (f=0 и w0=0). Кривая электродинамического торможения при этом проходит через начало координат. Режим торможения закзанчивает в момент, когда двигатель полность остановится (это можно увидеть на рисунке 3). 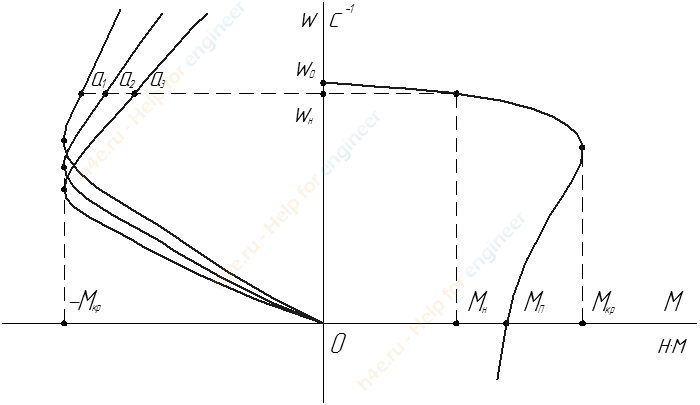 Насколько эффективным будет торможение зависит от:
Насколько эффективным будет торможение зависит от:- величины постоянного тока в обмотке статора (чем он больше, тем эффективнее торможение);
- дополнительного сопротивления в роторной цепи (если скомбинировать динамическое торможение и торможение с введенным в цепь резистором, эффект повысится). Это также видно из третьего рисунка.Стоит заметить, что чем большее количество резисторов подключено к сети, тем лучше и эффективнее будет торможение. Схематически, на кривой а1 отображена наиболее быстрая остановка из всех возможных;
- схемы, по которой соединены обмотки в статоре. МДС (магнитодвижущая сила) ((F) полностью связана с эффективностью тормоза. Чем больше эта сила, тем лучше эффект. Математически это можно выразить следующим образом:
F=I·W
Рисунки, приведенные ниже, изображают направления, по которым протекает постоянный ток в обмотках. IW – это ампервитки. Из-за одинакового количества витков в каждой обмотке, значение будет зависеть только от показателей тока. Векторные диаграммы отображают направление МДС. Если сложить векторы по правилам их суммирования, получиться вектор, обозначенный яркой стрелкой. Способы соединения обмоток в статоре:- Звезда;
- Треугольник;
- Звезда, две фазы у которой закорочены;
- Звезда с разорванным нулем;
- Треугольник, у которого закорочены две фазы.
Преимущества и недостатки динамического торможения
Положительные стороны:- просто осуществляется;
- режим включен вплоть до остановки двигателя;
- эффективность режима, особенно с дополнительным сопротивлением.
- возникновение только при условии ;
- возможны срывы моментов при некоторых условиях;
- конденсаторы должны иметь большую емкость, чтобы обеспечить должный эффект на низкой скорости.
