Эффективная работа производственных систем и оборудования – основная задача, решаемая современной автоматикой. В ней задействованы самые разные устройства, среди которых – двигатели бесщеточной конструкции. Рассмотрим же их ключевые особенности. [caption id="attachment_3231" align="aligncenter" width="512"]
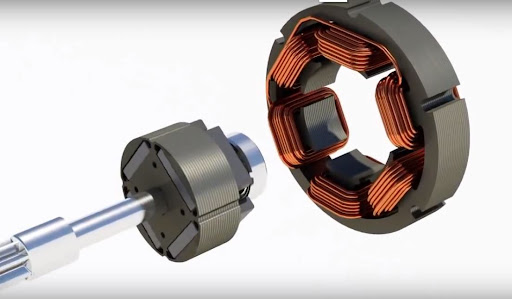
Бесщеточный двигатель постоянного тока трехфазный привод[/caption]
Работа двигателей постоянного тока бесщеточного типа
Моторы бесщеточного типа активно применяются в современной области хозяйственной деятельности, благодаря широкому перечню особенностей, которые существенно выделяют модели от других. Агрегаты компактные и в то же время функциональные, что расширяет перечень сфер, где их можно применять. Также устройства довольно экономичны, что обусловливает их рентабельность и общую выгоду применения. Далее мы обо все расскажем по порядку.Общие параметры
Бесщеточный или бесколлекторный электродвигатель представляет собой силовой агрегат для работы с постоянным напряжением электросети. Конструктивно компонент похож на электромотор с постоянными магнитами. Ключевая особенность – отсутствие щеток и, как следствие – необходимости их замены или ремонта. Долговечность моторов обусловливается выделением минимума тепла в роторе. Особенность конструкции состоит в реализации сложной схеме электрического привода, благодаря чему и удается обходиться без щеток. Данная компоновка подразумевает то, что роторное магнитное поле выполняет роль постоянного магнита, который бесперебойно синхронизируется со статорным полем. Эта особенность позволяет точно и быстро контролировать показатели скорости и момента вращения. Система возбуждения такого двигателя регулируется по-другому, чем у обыкновенных щеточных двигателей. В первую очередь это обусловливается тем, что в конструкцию бесщеточного устройства входят средства, определяющие угловое положение роторов и полюсов магнита. Эти данные в свою очередь необходимы для управления переключениями сигналов. Для чего они используются? Для обеспечения обратной связи при регулировании работы полупроводников. В современных приборах можно смело отказываться от узлов механической коммутации и менять задачи статора и ротора в силовых агрегатах постоянного тока. Общие и отличительные черты
Итак, в чем же особенность бесщеточного мотора и какие параметры у него общие, а какие отличительные от обычных устройств, работающих от источников питания постоянного тока?Общие характеристики моторов
Первое, что объединяет устройства этих двух типов – конструкция. Она включает два ключевых элемента:- ротор с катушечными обмотками. Эти элементы могут подключаться к постоянному току изнутри;
- статор с магнитами постоянного действия. Вместо магнитных компонентов могут применяться катушки электромагнитного типа, которые крепятся снаружи.
При питании двигателя от сети типа DC, внутри статора генерируется поле, которое может выполнять одно из двух действий: притягивать или отталкивать роторные магниты. В результате всех этих физических процессов ротор вращается и приводит в действие сопутствующие детали (например лопасти в квадрокоптерах). Коммутирующий элемент необходим в конструкциях данных моторов для поддержания стабильности работы ротора. Это очень важно, ведь при соответствии детали статорным магнитным силам, он (ротор) попросту остановится. Основная задача, которую выполняет коммутатор – переключение постоянного тока через обмотки, тем самым, регулируя магнитное поле. Роторный элемент может бесперебойно вращаться, на протяжении всего времени подачи питания на мотор. Отличия
Тип коммутатора – основное отличие между бесщеточными двигателями для DC и обычными моделями постоянного тока. В последнем случае конструкция включает угловые щетки. Главный недостаток этих составных компонентов – быстрое изнашивание. Чтобы избежать быстрого выхода из строя, в моделях без щеток применяют датчики, как правило – датчики Холла. Назначение этих приборов – точное измерения роторного положения и состояния печатной платы. Микросхема здесь выполняет функции переключателя. Входные параметры датчиков также обрабатываются посредством печатной платы, которая дает возможность с высоким уровнем точности определять необходимый момент для переключения при активном вращении ротора. [caption id="attachment_3230" align="aligncenter" width="662"]
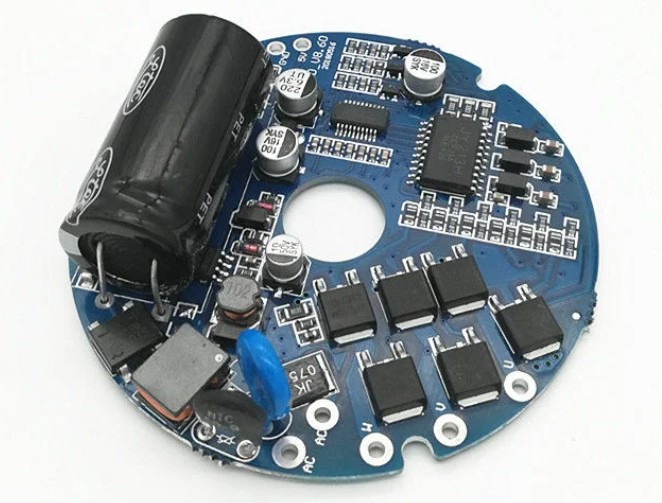
Пример платы управления двигателем[/caption]
Бесщеточное возбуждение
Это процесс уникален выполнением возбудителя и способом выпрямления тока, поступающего из якоря. Подача осуществляется напрямую в обмотки возбуждения ротора синхронного генератора. В роли возбудителя здесь выступает СГ, работающий от переменного тока (ас), обмотки возбуждения которого расположены на статоре и, соответственно, являются неподвижными. Обмотки же якоря установлены на ротор и присоединяются к преобразователю, который постоянно вращается. Ток уже с выпрямленными показателями направляется напрямую в роторную обмотку генератора. Процесс управления
Наличие электронного блока управления дает возможность проводить коммутацию элементов обмоток электрического привода. Чтобы определить точно момент переключения с использованием драйвера, необходимо отследить актуальное размещжение ротора. В этом поможет уже известный нам датчик Холла, который располагается непосредственно на приводе. Если же у вас нет в наличии такого прибора, стоит произвести считывание напряжения, движущегося в обратном направлении. Оно получается в обмотках статора, которые на момент измерений не подсоединены к сети. В таких ситуациях применяется контроллер – специализированное комбинированное решение, позволяющее проводить мониторинг всех изменений и точно определять очередность коммутации. Также контроллерное устройство является основным для старта работы мотора, без него запустить прибор невозможно.Трехфазные модификации
Данные модификации нередко встречаются среди бесколлекторных устройств, работающих с постоянным током. В частности, такие моторы можно увидеть на авиамоделях. Ключевая особенность – наличие преобразователей, которые и дают возможность работать от трех фаз, делая специализированные импульсы из напряжения DC. Принцип работы приспособлений осуществляется по такому алгоритму:- на первую катушку (назовем ее условно «А»), применяются импульсы со значением «+». На другую катушку «В» поступают сигналы с характеристиками «-». Из-за этого, якорь начинает вращаться. Датчики, смонтированные на приводе, фиксируют показания смещения и передают соответствующие сигналы на чувствительные элементы контроллера. После происходит коммутация;
- катушка «А» отключается, а сигнал «+» идет уже на третью обмотку – «С». Компонент «В» не изменяется;
- катушка «С» принимает импульс «плюсовой», «минусово» же подается на «А»;
- работают два компонента: «А» и «В». Каждый из них получает сигналы «+» и «-» соответственно;
- импульс «+» идет на вторую обмотку, а «-» - на третью;
- под конец снова запускается катушка «А», принимающая «плюсовые» импульсы, в то время, как «минусовой» поступает на «С».
[caption id="attachment_3229" align="aligncenter" width="910"]
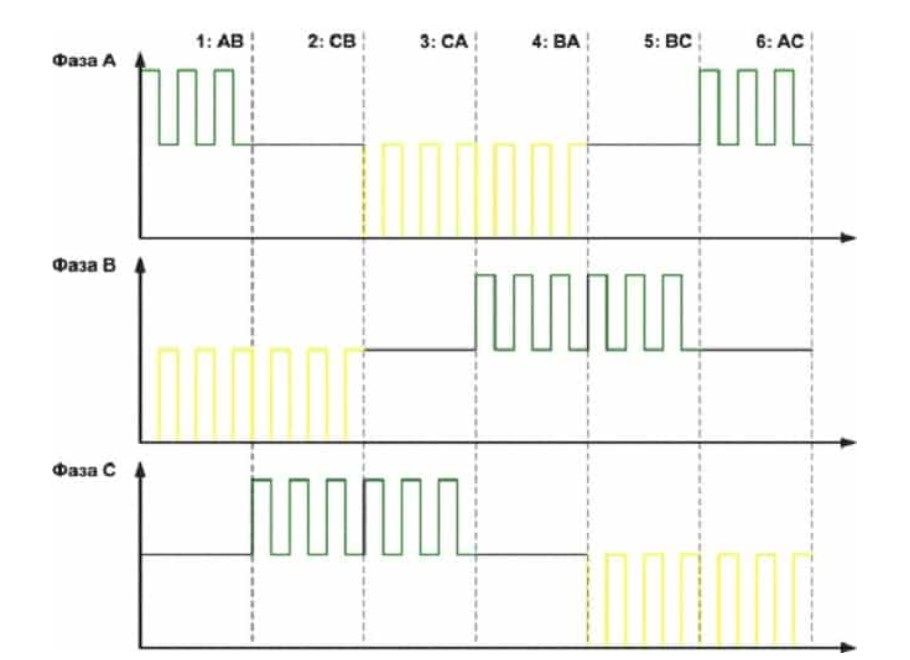
Напряжения двигателя[/caption]
Подбор двигателя
Существует множество материалов о том, как можно создать такой мотор самостоятельно. Главное – выбрать подходящий чертеж. Но, все же лучше отдать предпочтение заводским модификациям, которые отличаются высокой компактностью, надежностью и самое главное – безопасностью. При подборе стоит учитывать параметры драйверов для ШИМ-каналов. Им свойственны такие параметры:- сила тока. Имеется в виду максимально допустимый ее показатель, применяемый при обычном режиме функционирования приспособления;
- показатель штатного напряжения для обеспечения работы;
- уровни сопротивления электрических цепей контроллера;
- максимальное количество оборотов. Контроллер не даст возможности расширять вращение больше этого числа;
- интенсивность генерирования импульсов. Большинство моделей поддерживают данный параметр в диапазоне 7 – 8 кГц. Модели модернизированные имеют функцию перепрограммирования показателя, что позволяет увеличить его до уровня 16 и даже 32 кГц.
Первых 3 параметра напрямую определяют показатель мощности силового агрегата. [caption id="attachment_3228" align="aligncenter" width="689"]
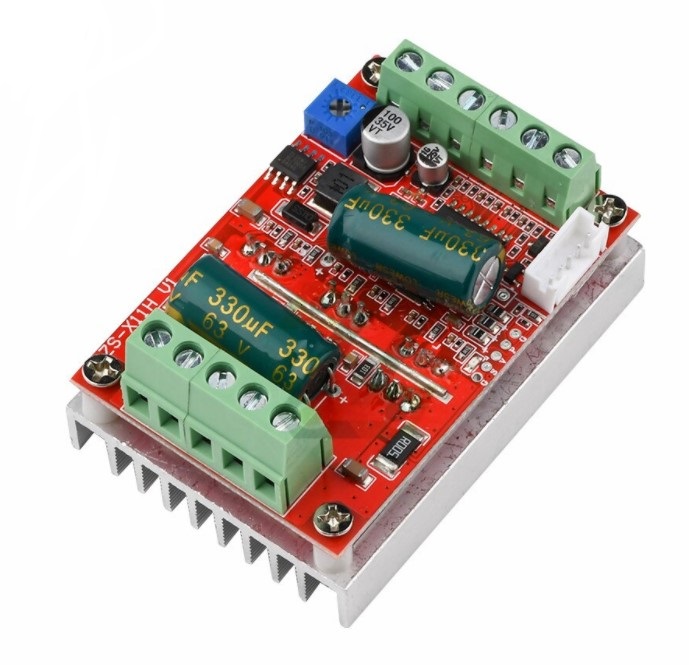
DC9-60V 400 Вт BLDC[/caption]
Преимущества применения
К сильным сторонам устройств относят:- увеличенный уровень КПД;
- выше показатели базовой мощности;
- оперативное достижение скорости вращения;
- минимум искрообразования;
- простота эксплуатации;
- не необходимости применять охлаждение.
Модельный ряд
Рассмотрим же некоторые популярные модели, представленные в этой категории. MTS DC 6-30V 5A
[caption id="attachment_3227" align="aligncenter" width="350"]

MTS DC 6-30V 15A[/caption]
Модель ШИМ контроллера рассчитана на работу с показателями напряжения 12 – 24 вольт. В процессе работы контролирует скорость работы двигателя. Параметры:- 0,01 – 150 Вт – управляемая мощность;
- ШИМ частота – 13 кГц;
- рабочий цикл регулировки – 0 – 100%.
DC9-60V 400 Вт BLDC
Бесщеточный двигатель на 3 фазы, разработан для управления мотором PWM Hall. Конструкция включает модуль для драйвера двигателя и плату управления. Обеспечивает нормальную работу двигателя, аналоговый контроль. https://youtu.be/7N9CHEF2214

