Бесколлекторные электромоторы используют в производстве медицинской техники, современных гаджетов и нефтяной промышленности. Что это такое, и с чем его «едят»? Разбираемся ниже в статье.
Конструкция бесколлекторного электромотора
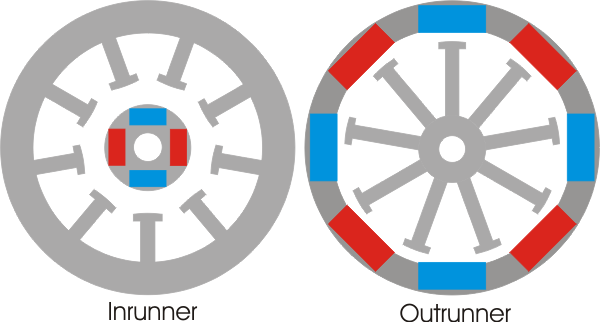
Конструктивно бесколлекторный двигатель состоит из ротора (в нем также расположены постоянные магниты) и статора (на нем установлены обмотки). Все приводы можно разделить на два вида:Inrunners. Роторные магниты у них находятся с внутренней стороны статора. Строение у них проще, так как статор может выполнять сразу две функции: свою непосредственную и корпуса. К нему можно монтировать крепежи.Outrunners. Тут магниты установлены вне статора: они вращаются вокруг него.В этом типе внешняя часть приходит во вращение. Двигатель крепят на неподвижной оси или детали статора. С мотор-колесом его крепят за статорную ось, а все провода заводятся к самому статору.
О магнитах полюсах электродвигателя
На роторе находится четное количество полюсов. Магниты ставят, как правило, прямоугольные. Иногда ставят и в форме цилиндров, хотя это встречается редко. Полюса при установке чередуют, при этом количественно магниты не всегда равны их числу. Это связано с тем, что 1 полюс могут формировать, например, 2 магнита.На изображении выше показано, как восемь магнитов формируют четыре полюса. Размер деталей зависит от геометрического устройства конкретного электропривода, его характеристик. Машина будет развивать силовой момент тем выше, чем сильнее магнит, который применяется в двигателе.Роторные магниты крепятся на специальный клей, хотя существуют конструкции и с держателем. Материал, из которого сделан ротор, может быть выполненным из стали или сплавов с алюминием, а также из пластика.
Про обмотки и зубья
Намотка в бесколлекторном движке сделана из медного провода. В проводе может быть одна или несколько изолированных друг от друга жил. Статор делают из листов магнитопроводящего материала (стали), сложенных вместе. Зубья в статоре, точнее их количество, кратно количеству фаз. Другими словами, если двигатель трехфазный, то количество его фаз должно нацело делиться на три. Что касается полюсов, с их количеством число зубьев никак особо не соотносят. Есть электромоторы, схемы которых представляют собой (зубья/магниты): 9/12, 51/46. Двигатели, статор которых содержит трое зубьев использую очень редко. Причина этому – работа двух фаз в любом из временных моментов (если обмотки включены по схеме звезды).Силы которые действуют на ротор хотят его, так сказать, перекосить. Это увеличивает вибрации. Чтобы от этого избавиться, в статоре монтируют как можно больше зубьев (в разумных пределах), а его обмотка распределяется равномерно по всей окружности. Таким образом, получаем, компенсацию магнитных силс, которые действую на ротор. Дисбаланс при этом отсутствует.
Работа бесколлекторных машин
Работа бесколлекторных электродвигателей невозможна без специального прибора – контроллера. Этим они (кроме, собственно, отсутствия коллектора) отличаются от, например, коллекторных асинхронных двигателей переменного тока. Исключительно наличие в системе контроллера позволит запустить движок так, чтобы векторы ротора и статора располагались перпендикулярно. Выражаясь иначе, контроллер нужен для того, чтобы контролировать вращающий момент, оказывающий влияние на ротор привода. Схематически процесс изображен на рисунке ниже.Движение ротора невозможно без коммутации в обмотках статора. В этом заключается основной принцип функционирования машины, не позволяющий осуществить ее плавную работу. Положительный момент тут в том, что разгоняется мотор достаточно быстро.Проверить бесколлекторный двигатель можно с помощью мультиметра в режиме «Прозвона», амперметра, омметра или вольтметра.
Пуск и реверс электропривода
Мы уже знаем, что запуск бесколлекторного электродвигателя требует присутствия контроллера. Он изображен на фото ниже.Его можно собрать и своими руками. Однако, но смысла в самодельном контроллере никакого. Купить его в магазине во-первых выгоднее, а во-вторых аппарат, сделанный на заводе, покажет себя гораздо лучше. Его достаточно просто подобрать под имеющийся движок. Вот, на что стоит обращать внимание:
Максимально возможная сила тока. Ее чаще всего указывают для обычного режима работы. Часто она присутствует в названии самого устройства. Вот пример маркировки: Phoenix 18 A 220В 50 Гц.
Максимальное напряжение. Оно может быть 12/24 вольт, 24В /36В, 36/48В и так далее.
Сопротивление внутренних цепей.
RPM или число оборотов за минуту. Прибор не будет выдавать более высоких показателей в связи с ограничениями на программном уровне. Важно также знать количество пар полюсов вашего двигателя. По умолчанию указывают то количество, которое ротор может совершить при наличии одной пары. Если их больше, то частоту надо разделить на количество этих пар.
Частотность импульсов. В обычных моторах это, как правило, 7-8 кГц, в более мощных и дорогих 16-32 кГц..
Обратите внимание, первые три пункта напрямую влияют на мощность электрического мотора.
Реверсирование
Реверс можно осуществить с помощью платы управления. При этом никаких особенно сложных действий или переделок совершать не надо. Это, фактически, штатная функция.Итак, откройте пульт управления, там будет небольшого размера плата, на которой находятся разъемы. Один из них, будет незадействованным и с тремя контактами. Задать направление вращения можно, соединив средний контакт с одним из тех, что с краю.По сути, для осуществления реверса нужно лишь замкнуть два контакта незадействованного разъема.
Принципы управления мотором
В качестве систем управления в таких приводах используют электронику. Регуляторы бывают двух видов:
Первый вид не требует применения датчиков. Их применение уместно там, где почти не происходит изменение пускового момента или нужно управление позиционированием привода.
Во втором виде есть датчики. Их ставят в движки, для которых характерно значительное изменение пускового момента. В основном, это системы невысокими значениями частоты.
Датчики в электронной системе управления нужны для определения положение якоря при подаче питания на обмотки.Ниже кратко описаны три наиболее популярных типа таких устройств:
Датчик Холла. Нужны, чтобы отслеживать положение ротора в электроградусах. Вектор магнитного поля может занимать шесть разных положений. Чтобы создать один целостный датчик, их в конструкции нужно три. Целостный датчик Холла, состоящий из трех отдельных устройств имеет трехбитный выход. Устанавливать их нужно со смещением на 120 электрогардусов друг от друга, как обмотки. Магниты при этом можно использовать как воздействующие элементы.
Датчик с микроконтроллером. Управлять бесколлекторным мотором этом случает можно с помощью AVR ядра – чипа, который создан, чтобы выполнять заданные команды. Такой модуль управления можно прошить под нужные задачи, что позволит осуществлять максимально быстрый запуск двигателя при отсутствии дополнительных устройств. Он может выступать в роли системы управления скоростью машины.
Arduino. Аппаратно-вычислительная система Ардуино имеет в конструкции платы установленный микроконтроллер Atmel AVR и характерен элементной обвязкой программирования. Такая плата превращает сигнал одного уровня в сигнал другого. Настраивать ПО такой системы удобно, это можно сделать даже через USB.
А вот чтобы управлять регулятором в двигателе нужно использовать Ардуино-библиотеку под названием Servo. Управляющий сигнал, естественно, имеет минимально и максимальное значение. Диапазон выглядит следующим образом: от 800 мксек до 2300 мксек.Какой бы вид датчиков не использовали, они используются для осуществления векторного управления БД.
О векторном управлении
Развитие наибольшего момента двигателя возможно только при условии ротора, перпендикулярно расположенного к вектору тока.При создании системы на микроконтроллере мы все хотим, что при минимальных активных потерях двигатель выдавал максимальный момент. Потери – это электроток в обмотках. Логичнее всего в такой ситуации установить вектор фазного электротока так, чтобы он был постоянно перпендикулярным относительно магнита.Говоря иначе, нужно все перевернуть с ног на голову: ротор продолжит вращение, но двигаться по направлению к вектору уже не будет. Мы прикрепим вектор к ротору.Регулировать момент бесколлекторного привода можно через электротоковую амплитуду. Увеличение момента будет следствием роста амплитуды.Вращение тока в обмотках и его частота нам уже не интересны. Как ротор начнет вращение, так оно и будет продолжаться. Мы управляем моментом на валу ротора.Это, собственно, принцип векторного управления. Именно его чаще всего описывают в литературе. Мы управляем вектором электротока в статоре, т.е. заставляем его занять позицию, в которой он будет перпендикулярным роторным магнитам.
Где применяют бесколлекторные двигатели постоянного тока
Высокий КПД бесколлекторных двигателей, высокая удельная мощность, возможность работы на высокой скорости, долговечность и низкая цена – причина, по которой сегодня эти моторы широко распространены в России и по всему миру. К тому же, стремительное развитие технической отрасли, в которой используют полупроводники, сделала и без того бюджетные, небольшие, но мощные контроллеры еще более доступными. А без них, напомним, работа таких движков невозможна. [caption id="attachment_4301" align="aligncenter" width="417"] Отличия между двигателями[/caption] Логично применять бесколлекторные машины там, где их использование будет давать наиболее результативные показатели относительно других электромоторов. Например, на тех производствах, которые требуют совершения тысяч оборотов за минуту. Когда рассчитывается, что машина прослужит долго, а особенности изделия затрудняют проведение ремонта, бесколлекторный двигатель будет преимуществом.Моторы типа Inrunner чаще используют в охлаждающих системах или силовых установках дронов. Одним словом там, где важна высокая скорость работы.А вот Outrunner уместен там, где на первый план выходит точное позиционирование, что характерно для робототехники и медицины.Бесколлекторные двигатели применяют в нефтедобывающей промышленности, когда оборудование находится под водой, в производстве автомобилей, в отопителях, для моделей машинок, в торцовочных пилах с протяжкой. Их также используют для моделей кораблей, для автомоделей и ставят в машинки на радиоуправлении.Бесколлекторные тяговые двигатели применяют для приведения в движение транспортных средств, работающих на электричестве.Для мотоблоков, культиваторов и газонокосилок используют эл. двигатели с редуктором.Можно ли использовать БД в качестве генератора? Ответ – да. Генератор из привода можно собрать по одной из схем на изображении ниже.Практически во всех вышеперечисленных приборах применяются приводы мощностью до 10 кВт. Так как величина напряжения бытовой сети составляет 220В, все двигатели этих устройств также имеют возможность подключатся на 220 В.
Как выбрать подходящий мотор?
Чтобы понять, как выбрать нужный вам мотор, важно разобрать информацию на шильде. Обратите внимание на:
Значение максимального тока, которое выдерживают обмотки в течение небольшого временного отрезка. Это означает, что превышение этого времени, двигатель рано или поздно сломается.
Величина максимального напряжения. Та же ситуация, что и с током: какое напряжение обмотки выдерживают в течение короткого отрезка времени.
KV — сколько раз мотор оборачивается на вольт. Значение KV зависит только от нагрузки на вал электромотора. На двигателе его указывают для холостого хода (при отсутствии какой-либо нагрузки вообще).
КПД машины прямо зависит от величины сопротивления. Чем оно меньше, тем больше будет коэффициент.
Если нужно провести расчет каких-либо показателей, вы можете использовать онлайн калькулятор для БД. https://www.youtube.com/watch?v=Yy9lJFcwkYQ


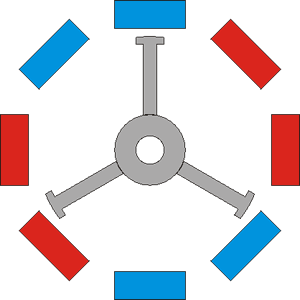 На изображении выше показано, как восемь магнитов формируют четыре полюса. Размер деталей зависит от геометрического устройства конкретного электропривода, его характеристик. Машина будет развивать силовой момент тем выше, чем сильнее магнит, который применяется в двигателе. Роторные магниты крепятся на специальный клей, хотя существуют конструкции и с держателем. Материал, из которого сделан ротор, может быть выполненным из стали или сплавов с алюминием, а также из пластика.
На изображении выше показано, как восемь магнитов формируют четыре полюса. Размер деталей зависит от геометрического устройства конкретного электропривода, его характеристик. Машина будет развивать силовой момент тем выше, чем сильнее магнит, который применяется в двигателе. Роторные магниты крепятся на специальный клей, хотя существуют конструкции и с держателем. Материал, из которого сделан ротор, может быть выполненным из стали или сплавов с алюминием, а также из пластика.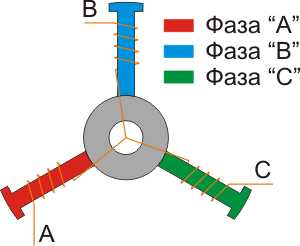 Двигатели, статор которых содержит трое зубьев использую очень редко. Причина этому – работа двух фаз в любом из временных моментов (если обмотки включены по схеме звезды). Силы которые действуют на ротор хотят его, так сказать, перекосить. Это увеличивает вибрации. Чтобы от этого избавиться, в статоре монтируют как можно больше зубьев (в разумных пределах), а его обмотка распределяется равномерно по всей окружности. Таким образом, получаем, компенсацию магнитных силс, которые действую на ротор. Дисбаланс при этом отсутствует.
Двигатели, статор которых содержит трое зубьев использую очень редко. Причина этому – работа двух фаз в любом из временных моментов (если обмотки включены по схеме звезды). Силы которые действуют на ротор хотят его, так сказать, перекосить. Это увеличивает вибрации. Чтобы от этого избавиться, в статоре монтируют как можно больше зубьев (в разумных пределах), а его обмотка распределяется равномерно по всей окружности. Таким образом, получаем, компенсацию магнитных силс, которые действую на ротор. Дисбаланс при этом отсутствует. Движение ротора невозможно без коммутации в обмотках статора. В этом заключается основной принцип функционирования машины, не позволяющий осуществить ее плавную работу. Положительный момент тут в том, что разгоняется мотор достаточно быстро. Проверить бесколлекторный двигатель можно с помощью мультиметра в режиме «Прозвона», амперметра, омметра или вольтметра.
Движение ротора невозможно без коммутации в обмотках статора. В этом заключается основной принцип функционирования машины, не позволяющий осуществить ее плавную работу. Положительный момент тут в том, что разгоняется мотор достаточно быстро. Проверить бесколлекторный двигатель можно с помощью мультиметра в режиме «Прозвона», амперметра, омметра или вольтметра. Отличия между двигателями[/caption] Логично применять бесколлекторные машины там, где их использование будет давать наиболее результативные показатели относительно других электромоторов. Например, на тех производствах, которые требуют совершения тысяч оборотов за минуту. Когда рассчитывается, что машина прослужит долго, а особенности изделия затрудняют проведение ремонта, бесколлекторный двигатель будет преимуществом. Моторы типа Inrunner чаще используют в охлаждающих системах или силовых установках дронов. Одним словом там, где важна высокая скорость работы. А вот Outrunner уместен там, где на первый план выходит точное позиционирование, что характерно для робототехники и медицины. Бесколлекторные двигатели применяют в нефтедобывающей промышленности, когда оборудование находится под водой, в производстве автомобилей, в отопителях, для моделей машинок, в торцовочных пилах с протяжкой. Их также используют для моделей кораблей, для автомоделей и ставят в машинки на радиоуправлении. Бесколлекторные тяговые двигатели применяют для приведения в движение транспортных средств, работающих на электричестве. Для мотоблоков, культиваторов и газонокосилок используют эл. двигатели с редуктором. Можно ли использовать БД в качестве генератора? Ответ – да. Генератор из привода можно собрать по одной из схем на изображении ниже.
Отличия между двигателями[/caption] Логично применять бесколлекторные машины там, где их использование будет давать наиболее результативные показатели относительно других электромоторов. Например, на тех производствах, которые требуют совершения тысяч оборотов за минуту. Когда рассчитывается, что машина прослужит долго, а особенности изделия затрудняют проведение ремонта, бесколлекторный двигатель будет преимуществом. Моторы типа Inrunner чаще используют в охлаждающих системах или силовых установках дронов. Одним словом там, где важна высокая скорость работы. А вот Outrunner уместен там, где на первый план выходит точное позиционирование, что характерно для робототехники и медицины. Бесколлекторные двигатели применяют в нефтедобывающей промышленности, когда оборудование находится под водой, в производстве автомобилей, в отопителях, для моделей машинок, в торцовочных пилах с протяжкой. Их также используют для моделей кораблей, для автомоделей и ставят в машинки на радиоуправлении. Бесколлекторные тяговые двигатели применяют для приведения в движение транспортных средств, работающих на электричестве. Для мотоблоков, культиваторов и газонокосилок используют эл. двигатели с редуктором. Можно ли использовать БД в качестве генератора? Ответ – да. Генератор из привода можно собрать по одной из схем на изображении ниже. 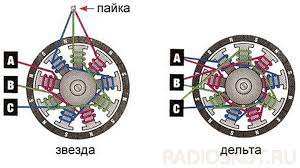 Практически во всех вышеперечисленных приборах применяются приводы мощностью до 10 кВт. Так как величина напряжения бытовой сети составляет 220В, все двигатели этих устройств также имеют возможность подключатся на 220 В.
Практически во всех вышеперечисленных приборах применяются приводы мощностью до 10 кВт. Так как величина напряжения бытовой сети составляет 220В, все двигатели этих устройств также имеют возможность подключатся на 220 В.