В статье мы рассмотрим особенности компоновки электрической схемы приводных элементов мостовых кранов. На рынке представлено множество производителей, каждый из которых реализовал свои технологические разработки. Компонент обладает широкий перечень параметров, которые мы и проанализируем далее. [caption id="attachment_2704" align="aligncenter" width="430"]
Принципиальные электрические схемы мостовых кранов[/caption]
Электрический привод представляет собой полноценную систему электромеханического типа, основная задача которого – приведение в движение машин и оборудования, а также постоянное управление движением. Основная цель применения – бесперебойное осуществление технологического процесса. Конструкция устройств регулярно модернизируется, благодаря чему можно смело утверждать, что агрегат – совокупность перечня электрических машин и управленческих систем. силовой агрегат потребляет около 60% от общего объема электроэнергии и выделяет большую долю механической энергии, среди всех компонентов системы. Общая характеристика
Приводы, устанавливаемые в грузоподъемных машинах, работают в повторно-кратковременном режиме при высоких показателях частоты включения. Конструкция функциональная, что дает возможность работать в широком диапазоне регулировок скоростей. Надежность обеспечивает высокий уровень функциональности даже при значительных перегрузках в процессе разгона и торможения агрегатов. Электропривод мостового строительного крана – это устройство, которое реализуется в нескольких модификациях постоянного и переменного токов. Также категория включает такие вспомогательные приборы:- контроллеры магнитного и силового типов;
- кнопочные посты;
- командные контроллеры;
- конечные выключатели;
- тормозные электромагниты;
- резисторы;
- тормозные электрические магниты.
Разновидности планирования
Электрические схемы мостовых кранов обладают узкой специализацией, отвечая за конкретные узлы рабочего механизма. Сами схемы бывают трех типов:- принципиальные;
- монтажные;
- маркированные;
- элементные.
Все они обладают принципиальными функциональными особенностями, которые учитываются при проектировании. Схема создается при условиях, приближенных к идеальным, с минимумом внешних воздействий. 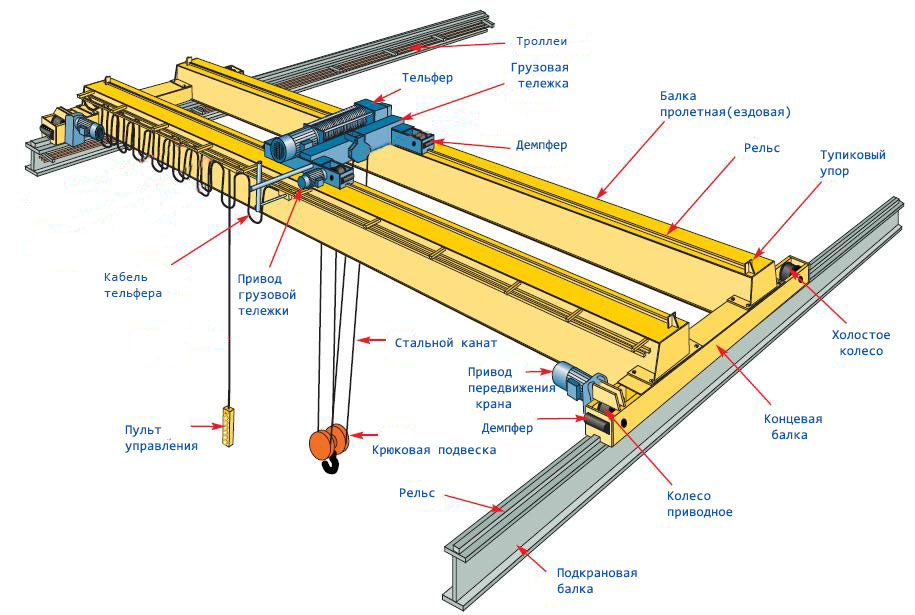 Самые простые – принципиальные, используются при проведении ремонта и реализации настройки транспортно-подъемного агрегата. Схема дает возможность точно отображать полный перечень конструктивных элементов, разделяя систему по цепочкам, поддающихся простой и быстрой идентификации. Варианты, сконструированные на основе чертежей механизмов, классифицируются на цепи осуществления управления и питания. Каждая из них обладает своими обозначениями, которые выражаются в тонких и толстых линиях. Установочная схема включает все указания взаимных расположений источников питания и вспомогательных компонентов. Каждый отдельный компонент электрической схемы привода обладает особым обозначением. Барабанные версии, например, демонстрируются в форме разверток, контакты подвижного типа на чертежах рисуются прямоугольниками, пронумерованные линии указывают на положение. В большинстве случаев схемы определяют последовательности подключения всех составных элементов:
Самые простые – принципиальные, используются при проведении ремонта и реализации настройки транспортно-подъемного агрегата. Схема дает возможность точно отображать полный перечень конструктивных элементов, разделяя систему по цепочкам, поддающихся простой и быстрой идентификации. Варианты, сконструированные на основе чертежей механизмов, классифицируются на цепи осуществления управления и питания. Каждая из них обладает своими обозначениями, которые выражаются в тонких и толстых линиях. Установочная схема включает все указания взаимных расположений источников питания и вспомогательных компонентов. Каждый отдельный компонент электрической схемы привода обладает особым обозначением. Барабанные версии, например, демонстрируются в форме разверток, контакты подвижного типа на чертежах рисуются прямоугольниками, пронумерованные линии указывают на положение. В большинстве случаев схемы определяют последовательности подключения всех составных элементов:- перемещения;
- подъема;
- защиты.
Но на схемах не указывается пропорциональность расположения. Конструктивные особенности
Схема является достаточно технически сложным компонентом, состоящим из нескольких функциональных линий и участков. Рассмотрим их по отдельности, чтобы лучше ориентироваться в принципе действия электрического привода. Контакты контакторов силового действия
Элементы применяются в ситуациях, когда кран осуществляет подъем или опускание груза. В этих случаях возникает необходимость изменения направления вращений двигателя. Реализуется данная задача посредством переключения фаз, которые подаются на обмотки статора электрического мотора. Функция обеспечивается контакторами силового типа, каждый из которых обладает по два контакта аналогичного действия. Детали являются основными, главное их назначение – обеспечивать прохождение больших токов. Если говорить об агрегатах постоянного тока, то их катушки разработаны для использования в сетях с неизменными параметрами напряжения. Сами же контакты подходят для передачи как постоянного, так и переменного токов. Но, тем не менее, в большинстве современных конструкций используются именно контакты типа DC, как более надежные, чем компоненты типа АС. А также постоянные контакты обладают еще одним преимуществом – для них является возможность подключения катушек независимо от их полярности. Многие задаются вопросом – как на кран подводится постоянный ток? Ответ простой – он вырабатывается посредством выпрямления переменных токов при помощи диодов. Мощный трансформатор снижает имеющиеся значения до показателей, которые подходят для катушек контакторов и реле DC. Диоды являются обязательным компонентами конструкции. Релейные приспособления максимальных токов обеспечивают защиту цепи от короткого замыкания и перегрузок. В случае возникновения аварийных ситуаций реле отключает контактор, контакты которого осуществляют подачу напряжения на диоды. Стоит обращать внимание, что контактор относится к устройствам, работающим от переменного тока. Этот показатель стабильный, ведь при включении компонента постоянное напряжение еще не успевает сгенерироваться. Также краны включают несколько конденсаторов (в зависимости от конкретного типа модели). Они выполняют немаловажную функцию – уменьшают колебания результативного напряжения, ведь после диодов ток выходит не на 100% постоянным, а пульсирующим. Маломощные компоненты в силовых цепях используют контакторы АС. Конструкция в целом – одна из самых оптимальных, но не лишена недостатков. Один из них – возможное наличие вибраций.Реализация сопротивления
 Оператор при работе с краном осуществляет не только переключение направлений оборотов двигателя. Скорость вращения также поддается регулярным изменениям. Воплощается это достаточно просто – с помощью двигателя подъема. Агрегат асинхронный, включает фазный ротор. Это указывает на некоторые отличия, среди которых – навивание напряжения в статоре. Обусловливается данная особенность наличием в роторе (движущемся компоненте) обмотки. Это ключевое отличие от традиционных асинхронных моторов. Самих роторных обмоток три, как и в статоре. Концы обмоток подключаются между собой в форме звезды, а начала соединяются с кольцами, на которых перемещаются щетки. От последних элементов ответвляются кабели, ведущие к сопротивлениям. Они же, в свою очередь, являются спиралевидными компонентами (в отдельных случаях – деталями из сильно изогнутой проволоки), изготовленными из сплавов, обладающих высокими сопротивлениями. Располагаются они в ящиках специальной конструкции. Контейнеры в свою очередь соединяются в блоки. Они также размещаются в шкафах, а сопротивления подключаются друг к другу в форме звездочки.
Оператор при работе с краном осуществляет не только переключение направлений оборотов двигателя. Скорость вращения также поддается регулярным изменениям. Воплощается это достаточно просто – с помощью двигателя подъема. Агрегат асинхронный, включает фазный ротор. Это указывает на некоторые отличия, среди которых – навивание напряжения в статоре. Обусловливается данная особенность наличием в роторе (движущемся компоненте) обмотки. Это ключевое отличие от традиционных асинхронных моторов. Самих роторных обмоток три, как и в статоре. Концы обмоток подключаются между собой в форме звезды, а начала соединяются с кольцами, на которых перемещаются щетки. От последних элементов ответвляются кабели, ведущие к сопротивлениям. Они же, в свою очередь, являются спиралевидными компонентами (в отдельных случаях – деталями из сильно изогнутой проволоки), изготовленными из сплавов, обладающих высокими сопротивлениями. Располагаются они в ящиках специальной конструкции. Контейнеры в свою очередь соединяются в блоки. Они также размещаются в шкафах, а сопротивления подключаются друг к другу в форме звездочки. [caption id="attachment_2708" align="aligncenter" width="357"]

Блоки контейнеров[/caption]
Скорость оборотов мотора изменяется посредством закорачивания частей сопротивления контакторами, которые называются элементами ускорения. Показатели сопротивления в цепях обмоток ротора минимальные, уровни тока – максимальные. С правой стороны контакторы не включаются, сопротивления здесь на максимальном уровне, а скорость наоборот – минимальная. Гибкие кабели
Моторы подъемных кранов располагаются на платформе поворотной конструкции, которая располагается на тележке, перемещаемой по мостовых балках кранов. Другие составные части устанавливаются на мостовых балках. Мотор соединяется с вышеописанными компонентами именно гибкими кабелями, которые располагаются на весу на тросе. При перемещениях телеги по мосту кабельные соединители двигаются следом. Сгибаясь в процессе работы жилы проводов могут ломаться, что в результате приводит к неисправностям. Реализованы также модификации, вдоль мостов которых движутся дополнительные троллеи. При движении телеги токосъемные элементы, присоединенные к телеге ездят вместе с основным компонентом. Благодаря этому, напряжение подается напрямую на телегу с моста. [caption id="attachment_2700" align="aligncenter" width="512"]

Гибкие кабели на готовой конструкции[/caption]
Контактор типа РН и контроллер
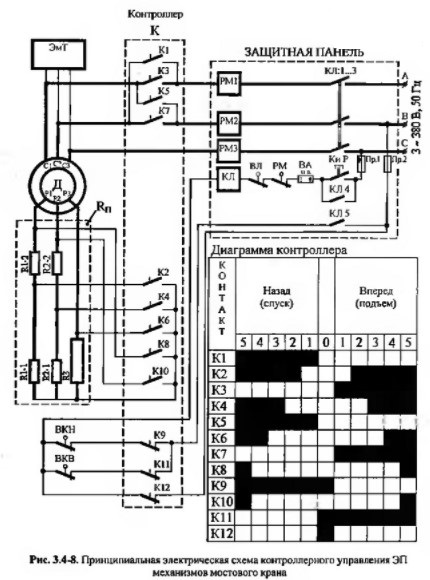
Итак, контроллер представляет собой точный агрегат, осуществляющий непосредственное управление краном. Отдельно на конструкции обозначается номер шайбы контроллерного элемента. Есть на корпусе и другие цифры, а также прерывистые линии, указывающие на актуальное положение контроллерного рычага. Черная точка, к примеру, идентифицирует замыкание контакта в выбранном положении. Если же точки нет, тогда контакт, соответственно разомкнут. 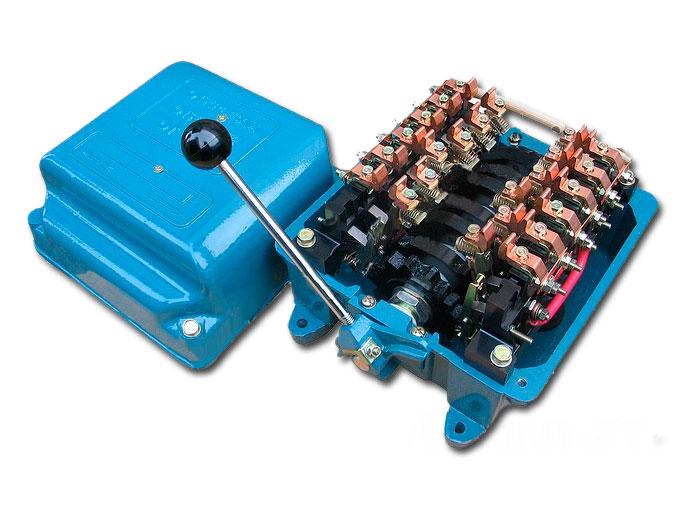 Второй обязательный элемент – контактор РН, функционал которого позволяет называть его реле. Возможности компонента по-настоящему широкие, в частности в них включен функционал пускателя. Деталь оборудована катушкой, через которую проходит ток и вследствие чего контакты замыкаются или размыкаются. На схеме видно, что при «нулевом» положении контактора, соединительные элементы замыкаются и начинается подача напряжения на катушку РН контактора. В случае срабатывания контактора, агрегат задействует контакт для самостоятельного «подхвата». Этот компонент отличается тем, что может бесперебойно работать и в других положениях реле. Отключает контроллер также довольно просто – выключением устройств 1 и 2 РУ. При запуске реле с максимальным током МР при перегрузках электромотора. Контакторы на 1В запускаются при подъеме крановой конструкции. Даже если при срабатывании РН устройство не выключается в ситуациях, когда цепочка шунтирования не размыкается. Включает цепочка также контакты из конечного выключателя типа ВКГ2, срабатывающий при поднятии веса на слишком большую высоту. Элемент реле К3 также присутствует, и он всегда находится в замкнутом положении при нормальном функционировании крана. Отметим, что вышеупомянутое реле относится больше к защитным системам, применяемым в связи с технологическими особенностями кранов с траверсами. С их помощью груз можно поднимать вплоть до момента срабатывания конечного выключателя. Лампочка, находящаяся на схеме, сигнализирует оператору о нахождении контроллера в нулевом положении либо об активации контактора РН.
Второй обязательный элемент – контактор РН, функционал которого позволяет называть его реле. Возможности компонента по-настоящему широкие, в частности в них включен функционал пускателя. Деталь оборудована катушкой, через которую проходит ток и вследствие чего контакты замыкаются или размыкаются. На схеме видно, что при «нулевом» положении контактора, соединительные элементы замыкаются и начинается подача напряжения на катушку РН контактора. В случае срабатывания контактора, агрегат задействует контакт для самостоятельного «подхвата». Этот компонент отличается тем, что может бесперебойно работать и в других положениях реле. Отключает контроллер также довольно просто – выключением устройств 1 и 2 РУ. При запуске реле с максимальным током МР при перегрузках электромотора. Контакторы на 1В запускаются при подъеме крановой конструкции. Даже если при срабатывании РН устройство не выключается в ситуациях, когда цепочка шунтирования не размыкается. Включает цепочка также контакты из конечного выключателя типа ВКГ2, срабатывающий при поднятии веса на слишком большую высоту. Элемент реле К3 также присутствует, и он всегда находится в замкнутом положении при нормальном функционировании крана. Отметим, что вышеупомянутое реле относится больше к защитным системам, применяемым в связи с технологическими особенностями кранов с траверсами. С их помощью груз можно поднимать вплоть до момента срабатывания конечного выключателя. Лампочка, находящаяся на схеме, сигнализирует оператору о нахождении контроллера в нулевом положении либо об активации контактора РН. [caption id="attachment_2702" align="aligncenter" width="831"]
Контроллер и контактор РН[/caption]
А сейчас рассмотрим более подробно распространенные типы сетей. Цепь оперативного действия
Контактор типа РН отвечает за включение и отключение оперативной цепи подъемного механизма. Цепочка представляет собой элемент, осуществляющий подачу напряжения на контакторные катушки. Как правило, компоненты работают с напряжением 220 вольт, но есть и модификации с катушками на 110В. Конструкция схемы включает и детали, отвечающие за выполнение разных функций: - передвижения;
- транспортировки телеги;
- поворота платформы.
Все эти устройства работают с релейными приспособлениями РН. Сеть включает два контакта последовательного типа на случай, если один из этих элементов приварится к неподвижному контакту из-за больших токов. В ситуациях, когда оперативная цепь не имеет напряжения, нет необходимости ее включения. При осуществлении первичной подачи напряжения в ОЦ, машина не запускаются мгновенно, в каких бы положениях ни был контроллерный рычаг. Именно поэтому, крановщик для начала должен поставить рычаг в исходное положение, чтобы напряжение попало в цепь. Цепь магнитов растормаживающего действия
Ротор мотора подъемника блокируется тормозными механизмами, когда данный компонент выключен. Для того, чтобы обеспечить вращения ротора, необходимо срабатывание растормаживающего электромагнита, который оперативно отожмёт колодки тормоза. Компонент запускает электрический магнит контактора Т. Далее магнит последовательно подключается к сопротивлению РД-Г, которое дополнительно можно зашунтировать посредством контактора 1Т. Эта функция позволяет реле максимального тока бесперебойно контролировать величины токов, проходящих через катушки электрических магнитов. Сделано это с целью обеспечения контроля величин тока посредством реле РТ. Реализуется это, чтобы через катушку электромагнита проходило напряжение определенного уровня, для избегания перегорания. Если же ток все-таки превысит значения установленной величины, тогда реле РТ отключает элемент 1Т, а сопротивление шунта размыкается. В результате этих реакций ток, проходящий через катушку магнитной детали, уменьшается. Контакторы Т и 1Т на крановых установках реализованы в типе КПД. Предохранители 1П располагаются над аналогичным элементом 2П. В случае возникновения в цепях магнита замыкания и сгорания предохранителя 1П последует обесточивание оперативной цепи контакторов. Подъемный механизм останавливается и после этого происходит отключение реле 1 и 2 РУ, а также РН контактора. Особенности тормозных систем
Старые гидравлические тормозные системы имеют тенденцию протекать и требуют технического обслуживания и экологические проблемы. Их можно заменить современными «тормозами по проводам». Пакеты с педальным управлением тормоза подруливающего устройства переменного тока, которые решают эти проблемы. При этом, обеспечивается похожий эффект торможения, который присущ для работы с гидравлическими тормозами. Доступны также и полностью закрытые тормоза современного дизайна, соответствующие эксплуатационным характеристиками. Габаритные характеристики тормозов оригинального оборудования – представленные часто по более низкой цене.Принцип действия
Подъемные краны работают на два действия: подъем и спуск. Этим манипуляциям также отведены функции в электрических схемах привода. Принцип работы на подъем
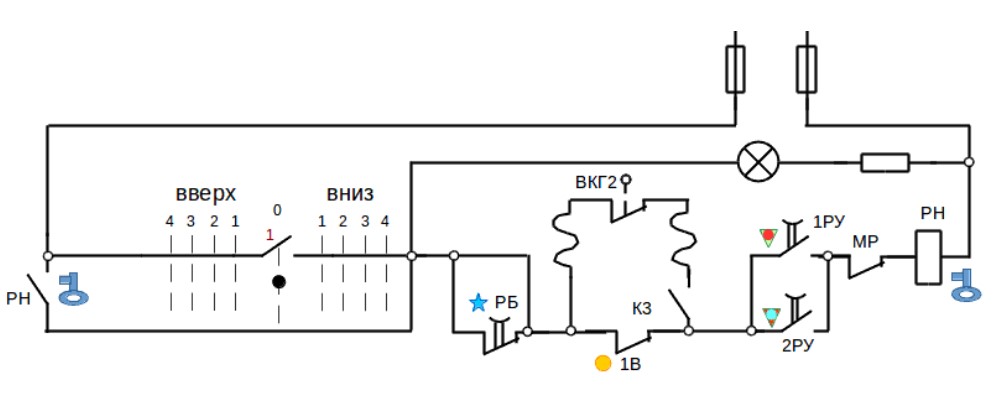
[caption id="attachment_2706" align="aligncenter" width="596"]
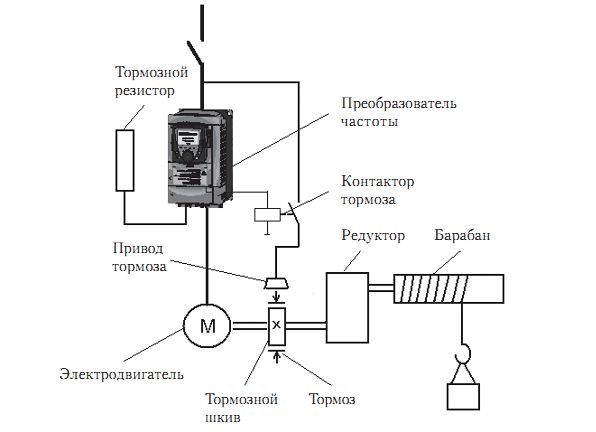
Схема подъема крана[/caption]
Реализовано 4 подъемных режима, которые обладают общими и отличительными характеристиками. Запуск контакторов магнита растормаживающего действия Т и Т1 осуществляется при параллельном отжимании тормозных колодок. Включаются контакторы силового действия 1 и 2В, приводящие в движение электродвигатель. Далее запускается контактор П, отвечающий за ускорение. Данный компонент отвечает также за обеспечение минимального ускорения мотора (на первой ступени). Поначалу происходит замыкание шайбы 7, запускающей 2В. С этой же шайбы напряжение поступает далее на 2 шайбу типа 1В, а потом только на 3 шайбу типа П. При реализации переходов на 2 – 4 режимы, наблюдается последовательное включение контакторов ускорения: 1 и 2У. только в четвертом режиме включаются версии 3 и 4У. Принцип работы на спуск
Процесс на порядок проще, чем подъем, ведь при поднятии груза необходимо задействовать определенную энергию, а при спуске она тратится в малых объемах или же вовсе не расходуется. Объект опускается самостоятельно, при помощи всем известной силы тяжести. Единственное, на что может потребоваться энергия – это на обеспечение притормаживания груза во время спуска, во избежание сильного разгона. Реализовано 4 ключевые режима для обеспечения надежного спуска, рассмотрим же их. Первый режим
При реализации данной процедуры имеет место замыкание шайб контроллера 3, 2, 9 и 8. Третья шайба запускает контактор ускорения П, а вторая – силовой контактор 1В, работающий исключительно на подъем. Подача энергии на вышеуказанные шайбы осуществляется через девятую шайбу и контактные элементы РБ (в отдельных модификациях 1Т). https://youtu.be/8uiKHK9pc9o
В ситуациях, когда 1Т отключено, до катушек РБ напряжение соответственно не поступает. Исходя из этого можно догадаться, что не запускаются и другие функциональные компоненты:- электрический двигатель;
- тормозной механизм.
При нажатии оператором клавиши ВН2 запустятся компоненты Т и Т1, а следом за ними –приборы 2В, РБ, 1В и под самый конец – П. Как следствие – в статоре электромагнитное поле будет работать на подъем груза. Объяснение этому простое – режим 1 разработан для эффективного замедления опускающегося объекта. Это на порядок удобнее и выгоднее, чем применение привычных тормозных колодок, что существенно снижается износ компонентов. Это явление также известно, как остановка контртоком. Режим второй
По сути, алгоритм решения аналогичен первому, за исключением работы контактора ускорения типа П. В результате интенсивность груза снижается. Третий режим
При реализации этого механизма 1В и П не используются, вместо них активно применяются 2Н и 2В. В работу включается также 1Т, через РБ, контакт которого запускает Т-контактор. Дальше по цепочке включается контактор, отвечающий за ускорение 1У. 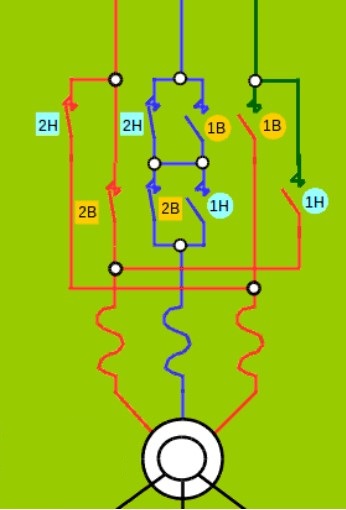 Осуществляя торможение по данному режиму сразу на 2 статорные обмотки, подается фаза с одними и теми же показателями. 3-я же фаза участия не принимает. Такой способ присоединения обмотки статора не позволит тормозить роторному элементу, куда бы не осуществлялись обороты. Он работает, обеспечивая спуск, тогда как статор параллельно реализует торможение.
Осуществляя торможение по данному режиму сразу на 2 статорные обмотки, подается фаза с одними и теми же показателями. 3-я же фаза участия не принимает. Такой способ присоединения обмотки статора не позволит тормозить роторному элементу, куда бы не осуществлялись обороты. Он работает, обеспечивая спуск, тогда как статор параллельно реализует торможение. Режим четвертый
Сначала происходит остановка контактора 2В, при последующем включении контактора силового типа 1Н. на электродвигатель поступает сразу три фазы, и силовой агрегат работает на понижение груза. 2, 3 и 4У контакторы также вступают в работу, обеспечивая ускорение. Как утверждают специалисты, данный режим прямо противоположный последнему «подъемному» режиму.Инновации в системах торможения
В современных схемах торможения применяются модернизированные тормоза, эффективность которых существенно улучшилась, тормозные накладки получили больший ресурс. Компоненты работают вместе с регуляторами частот переменного тока или же цифровыми контроллерами постоянного тока. Во многих случаях опорные подшипники в поворотных рычагах заменены самосмазывающимися. А композитные подшипники, устойчивые к ударам, не подверженные воздействию грязи или других загрязнений, и может работать в агрессивных средах. Функционал релейных устройств
Ключевыми реле в конструкции схемы привода подъемного механизма являются две модели: 1 и 2 РУ. Используются они в связке с другим базовым компонентом РБ, но функционал при этом разный. Один из примеров, когда при работе на 4 режиме подъема запускаются ускорительные контакторы: 3У и 4У. Если же осуществляется спуск на 4 режиме, тогда в работу вступают целых три контактора, прибавляется версия 2У. Это обусловливается конструкцией контроллера, которая обладает 4 рабочими режимами для каждой стороны. С целью избегания внезапных ускорений, включение старт контактора необходимо разъединить во времени. Этим и занимаются реле 1У и 2У. https://youtu.be/BsG88OZQmVU
Как можно видеть, принципиально реализованная схема дает возможность устанавливать кран и упрощать процессы сервисного обслуживания. Полное соблюдение параметров производителя позволит существенно снизить негативные влияния на механизмы подъемного крана. Конструкция приборов, применяющихся в схемах, регулярно модернизируется. 
