Первый ультразвуковой мотор был создан совсем недавно– в 1964 году. Что последовало за этим открытием, и как работают моторы с пьезоэлектрической керамикой? Говорим обо всем в этой статье. [caption id="attachment_4533" align="alignleft" width="241"]

Линейный пьезодвигатель[/caption]
Что такое пьезоэлектрический привод?
Пьезомагнитный (а также ультразвуковой, пьезо-, пьезоэлектрический) двигатель – это мотор, где роль рабочего элемента отведена пьезоэлектрической керамике. Так называют материал с поликристаллической структурой, в котором поляризация диэлектрика происходит под действием механического напряжения. Благодаря этой пьезокерамике превращение электрической энергии в механическую (главная функция всех моторов) происходит с очень большим коэффициентом полезного действия (КПД). В некоторых моделях агрегатов он может быть выше 90%. С ультразвуковым мотором появились и уникальные в своем роде устройства. В них электроколебания прямо превращаются во вращение якоря. В это время крутящий момент, который развивается на валу машины, настолько большой, что механический редуктор (он, как правило, увеличивает момент) не нужен совершенно. [caption id="attachment_4534" align="alignright" width="327"]

Пьезокерамика[/caption]
Этот двигатель также характерен своими выпрямительными свойствами гладкого фрикционного контакта, проявляемыми даже во время работы на звуковой частоте. Этот контакт – отличная замена для выпрямительного электродиода. Исходя из этого можно смело заявлять о том, что ультразвуковой электродвигатель, в отличие от, например, пульсирующего реактивного двигателя, относится к фрикционным.Как был изобретен пьезодвигатель?
Титан бария, материал, обладающий спонтанной поляризацией (сегнетоэлектрик) впервые был получен еще в 1947 году. Можно говорить, что запуск производства ультразвуковых моторов был возможен уже с этого года. Однако, все несколько задержалось. Лишь через два десятка лет один из работников КПИ им. Игоря Сикорского, Лавриненко Вячеслав Васильевич, изучавший, в каких режимах работают трансформаторы, обнаружил, что в одном из держателей присутствует вращение. В середине 60-х он, наконец, понял, что послужило появлению зафиксированного им факта и занялся разработкой первого в мире ультразвукового электродвигателя. После этого им же был изобретен и линейный двигатели, предназначенные для приводов реле. Закончив работу над прямым фрикционным контактом, он приступает к созданию нескольких электродвигателей без возможности реверса, в которых пьезокерамика связана с ротором посредством толкателей. Это послужило появлению десятков моделей нереверсивных моторов. Их скорости колебались приблизительно от 0 до 100 Нм. Вскоре Вячеслав Васильевич решает проблему отсутствия реверса. Для этого он использовал два пьезодвигателя. На валу одного из электродвигателей был установлен другой. Ресурсная проблема при этом решается путем возбуждения крутильных колебаний в керамике. Это был шаг минимум на десять лет вперед. Причем, как в СССР, так и в остальных странах. Валерий Лавриненко буквально изобрел основы и принципы конструкции и устройства ультразвуковых агрегатов. Кстати говоря, возможность того, что такие приводы могут работать и в генераторном режиме, он тоже не исключал. Вячеслав Васильевич, безусловно, понимал, насколько перспективна его разработка. Он и все соавторы, помогавшие ему в создании нового изобретения, в скорости защищают свое право на двигатель множеством свидетельств и патентов. В его университете появляется узконаправленная отраслевая лаборатория, в которой под чутким руководством Лавриненко идет работа над ультразвуковыми моторами, и всем что к ним относится. Уже вскоре организован первый в истории серийный выпуск ультразвуковых электромоторов. Их будут использовать в видеомагнитофоне под названием «Электроника-552», а потом они будут производиться и для проекторов диафильмов, кинематографических камер, шаровых камер. Начало 80-х годов двадцатого столетия ознаменовалось выпуском первой в мире книги об ультразвуковых двигателях под эгидой издательства «Энергия». Устройством интересуются все больше и больше. После выпуска книги серийный выпуск моторов начинается в Политехническом институте Каунаса (Литва). Производством руководит профессор Рагульскис К.М. Бывший аспирант Вячеслава Лавриненков, Вишневский В.С. переезжает в Германию. Там он продолжает дело своего бывшего наставника. С его подачи выпуск линейных ультразвуковых моторов начинается на одном из немецких заводов. Постепенно идеи Лавриненко начинают покидать границы Советского Союза. Разработкой начинают заниматься в Японии и КНР. Там появляются волновые электродвигатели, а в Соединенных Штатах – сверхминиатюрные двигатели вращения.Как устроены ультразвуковые электродвигатели?
Ультразвуковые двигатели характерны сравнительно маленькими размерами относительно обычный электромагнитных моторов со схожими силовыми характеристиками. Обмотки, пропитанные специальным склеивающим веществом, в них отсутствуют, поэтому такой мотор можно использовать даже в вакууме. Такой двигатель, благодаря конструктивным особенностям, также обладает высоким моментом самоторможения, составляющим почти половину от максимального значения крутящего момента. Это свойство очень полезно, когда нет напряжения, что питает мотор. Подобные возможности позволяют происходить совершенно маленькому угловому смещению (под малыми имеются в виду перемещения на угловые секунды). Специальные устройства или проведение определенных действий и алгоритмов для этого не требуются. Связано это с тем, что характер работы мотора – квазинепрерывный. Другими словами, пьезокерамику, превращающую электроколебания в механическую силу, питает исключительно переменный электроток, а частота его должна быть резонансна. Подав на двигатель один или два импульса, вы получите очень небольшое угловое смещение якоря. Приведем пример. Возьмем одну из ультразвуковых машин, частота которой составляет 2 МГц, а рабочая частота вращения равна 0,2-6 оборотов в секунду. Если на обкладки действующего элемента подать один импульс, это даст, при идеальном раскладе, угловое перемещение якоря приблизительно в 1/9900000 – 1/330000 величины всей окружности, а это где-то 0,13 – 0,19 угловых секунд. Один самых главных недостатков обсуждаемых сегодня электроприводов – большая чувствительность в ситуациях, когда в двигатель попадают твердые вещества (песок, к примеру). А вот преимущество – это возможность работать в жидкостях. Он спокойно функционирует во время нахождения воде или масле.Пьезоэлектродвигатель линейного типа и периодическое зацепление
Статор такой машины представляет собой биморфную пластину. Чем она будет тоньше, тем больше будет величина амплитуды колебаний вместе и ниже частотность резонанса. На этот так называемый гибкий статор подают высокочастотное переменное напряжение. Это напряжение в буквальном смысле заставляет мотор выдавать ультразвуковое колебание. Оно способствует формированию механической бегущей волны, что как бы цепляет, то есть толкает, якорь, находящийся рядом с ней. [caption id="attachment_4528" align="aligncenter" width="398"]
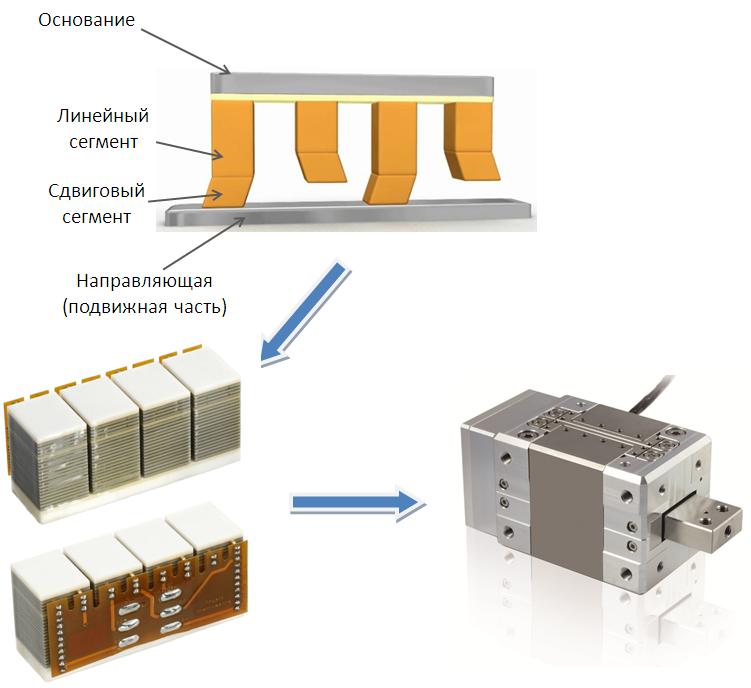
Конструкция ультразвукового двигателя[/caption]
Если движение направлено вправо, то толкающий элемент клинит, а если наоборот, влево, то расклинивает. По такому принципу работают все ультразвуковые двигатели, в устройстве которых есть толкатель. Если увеличить количество толкателей в цепи двигателя, можно увеличить и пусковой момент вплоть до огромных значений. Обычный электропривод можно собрать своими руками. У знающего человека это не отнимет много времени и сил. Двигатель же с пьезоэлементом в конструкции, коэффициент полезного действия которого будет составлять минимум 80%, невозможно создать «на коленке». Для требуется исключительно сложное оборудование. Конечно, если вас устроит КПД в районе 60%, ультразвуковой двигатель вполне реально собрать и в домашней мастерской. В этом случае ротор делают из шарикоподшипника и прижатой к нему пьезопластины. Величина деталей должна быть, естественно, согласована.О работе пьезодвигателя на трении
Вся работа таких ультразвуковых двигателей заключается в одном принципе. Состоит он в следующем: точки пьезокерамики, которые контактируют с якорем, должны двигаться по направлению, напоминающему форму эллипса. Чтобы это обеспечить, нужно одновременно привести в возбужденное состояние два колебания, являющихся ортогональными. Ими могут стать совершенно любые поперечные, продольные, изгибные, крутильные и сдвиговые колебания. [caption id="attachment_4529" align="alignright" width="342"]
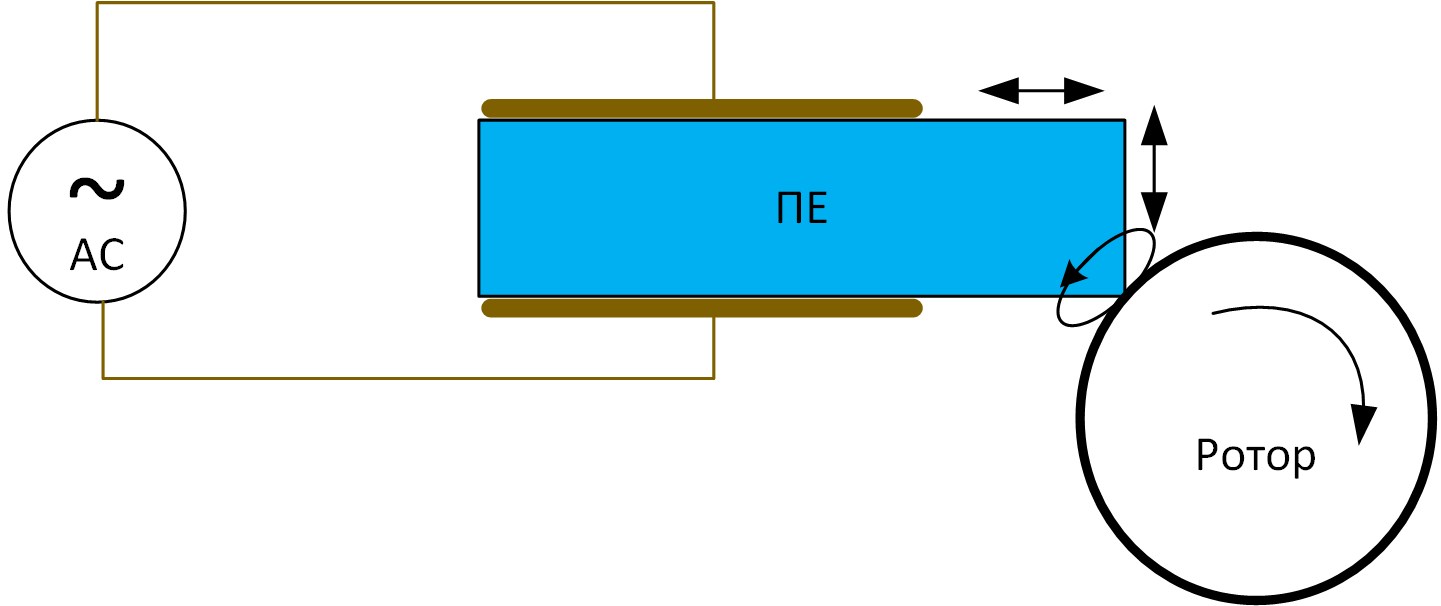
Пьезодвигатель вращения[/caption]
Важно в этом случае следующее: пара колебаний не должна быть связана в механическом смысле. Выражаясь иначе, энергия первого не должна переходить в энергию второго и наоборот. Например, если пластина квадратная, то при возбуждении колебаний продольного типа по одной из сторон станет причиной возбуждения их же, но с другой стороны пластины. А это уже связанные колебания. Если механическая связь между колебаниями отсутствует, возможен абсолютно любой сдвиг по фазе. В ультразвуковых двигателях наиболее приемлемым для нормальной работы мотора будет сдвиг фазы на 90 градусов. Самый обычный движок с пьезокерамикой в конструкции имеет продольные колебания по длине волны в качестве возбужденных. А вот изгибные поперечные волны будут возбуждаться, когда конец пьезоэлемента будет двигаться, соприкасаясь с якорем. Размер пьезоэлемента нужно подобрать таким образом, чтоб между продольными и поперечными колебаниями произошел механический резонанс. Только в этом случае КПД сможет превысить отметку 80%. В таких электродвигателях фрикционный контакт между двумя главными элементами всегда осуществляется по линии. Это способствует снижению их ресурса. Если использовать одни электроды для возбуждения крутильных колебаний, а другие электроды для возбуждения продольных, это будет называться двигателем с плоским фрикционным контактом. Ресурсная задача уже решена Вячеславом Лавриненко. Придумал он вот что: нужно пользоваться возможностью пластины с гладкой поверхностью (речь о том, что она наклонена и прижата) изменять усилие, с которым она прижата во время движения в разные стороны.Положительные стороны применения таких моторов
Важнейшей среди прочих положительных сторон использования ультразвукового электродвигателя можно смело назвать следующую его особенность: возможность подключения прямого мотора возможна для любой требующейся скорости вращения. [caption id="attachment_4532" align="alignleft" width="215"]

Привод шарового крана на основе пьезодвигателя[/caption]
Конструктивно такой двигатель намного проще, что значительно влияет на полезное действие в положительном смысле. Это делает редуктор ненужным. Благодаря такому свойству стало возможным серийное производство моторов для шаровых кранов с любым требуемым проходным сечением. Впечатляющее быстродействие – еще одно преимущество ультразвукового мотора среди других. В этих моторах скорость работы никак не связана с массой ротора (что характерно для обычных электромагнитных двигателей). Нужная скорость набирается моментально (доли миллисекунды). Тысячная доля угловой секунды – таким может быть значение минимального шага пьезодвигателя. Они стали основной для создания микроскопов, направляющие которых работают в диапазоне нанометров. В бытовых приборах они тоже используются. Тут преимуществом является отсутствие шума и запаха подгорелых обмоток (их у таких двигателей просто нет, мы уже это упоминали). В отключенном состоянии ротор заторможен. Форма пластична, и двигатель интегрально вписывается в любое подходящее изделие. Все это играет ему на руку. Кстати сказать, пьезодвигатель может быть сделан из полностью немагнитного материала. Отдельные модели устройств работают, даже если температура достигает трехсот градусов по Цельсию, в условиях вакуума или сильного магнитного поля, при высоком уровне радиоактивного излучения, в воде или масле. В отличие от тех же двигателей внутреннего сгорания, пьезодвигатель не требует раскоксовки для ухода за ним.Где используют пьезодвигатели
Пьезоэлектрический мотор уже несколько десятков лет с успехом применяют в тех отраслях, где важно достичь минимальных угловых и линейных перемещений. Ярким примером такой сферы может служить астрономия, космические исследования. В них необходимо точно фокусироваться на достаточно малые объекты. Нашли двигатели свое место и в приборах, ускоряющих заряженные частицы (самый яркий представитель – Большой адронный коллайдер). В этом случае важно удержать определенный пучок в строгих координатах. Используют обсуждаемые двигатели также в кристаллографии и робототехнике. Пьезодвигатели также стали основой, на которой были изобретены антенны, устройствах для скрытого наблюдения, моторы для режущей техники, электрических дрелей, современных протезов и бритв, вентиляторов для потолка, электроигрушках и многое, многое другое. Объективы зеркальных фотоаппаратов с одним объективом содержат в свей конструкции волновой пьезоэлектродвигатель. Ими могут похвастаться такие бренды как Сони, Никон или Кэнон. [caption id="attachment_4530" align="aligncenter" width="396"]

Ультразвуковой двигатель объектива с автофокусом.[/caption]
использование ультразвукового мотора не обошло стороной и станкостроение. Там они нужны для того, чтобы было возможным сверхточное позиционирование в режущих инструментах. Как пример можно привести держатели резцов в токарных станках. https://www.youtube.com/watch?v=3qF7L-Pb_e8

