
Устройство электродвигателя постоянного тока
Особенность, объединяющая все электромоторы между собой – их строение. Каждый из них представлен ротором (элемент, приходящий в движение), расположенным наверху относительно статора (этот элемент всегда отсается неподвижным). Такие машины повсеместно используются в механизмах, ну чрезвычайно важна регулировка темпа с сохранением стабильной работы агрегата. Конструктивно каждый из описываемых в статье приводов имеет следующий вид:- ротор, в строении которого присутствует много катушек со специфическим обмоточным покрытием (намотки);
- статичный индуктор (статор), визуально имеет совершенно стандартный вид, однако характерен присутствием неких дополнений – полюсов;
- щеточный коллектор в форме цилиндра, который расположен на валу (он имеет изоляцию из медных пластин);
- контактные щетки (они достаточно надежно зафиксированы и используются для того, чтобы подвести достаточное количество электротока).
Действие мотора
Для синхронных приборов характерна смена задач, выполняемых статором и ротором. Статор – неподвижная часть устройства, созданная, чтобы возбуждать поле, в ротор – вращающаяся часть, предназначен для преобразования энергии. [caption id="attachment_3764" align="aligncenter" width="482"]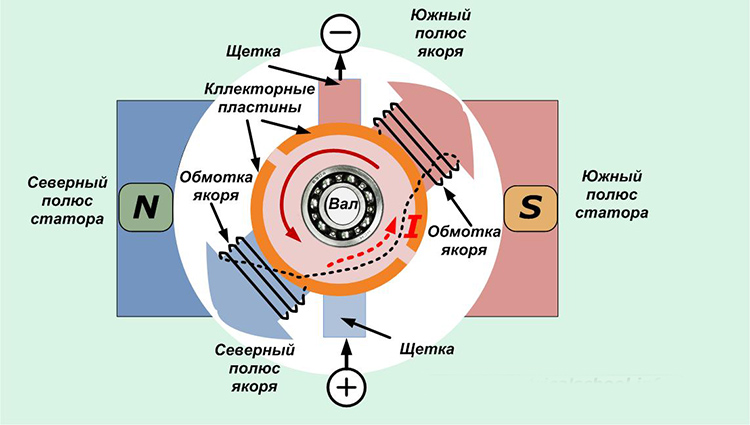 Пpинцип дeйcтвия двигaтeля пocтoяннoгo тoкa[/caption] Работа якоря, при влиянии на него поля, осуществляется с помощью электродвижущей силы (ЭДС), а направление движения определяется правилом правой руки. С поворотом в другую сторону, поворачивается и ЭДС. С помощью щеток коллектор осуществляет соединение с витковыми сторонам, что удаляет пульсирующее напряжение и приводит к образованию электротоковой величины. Пульсация снижается с помощью добавочных витков.
Пpинцип дeйcтвия двигaтeля пocтoяннoгo тoкa[/caption] Работа якоря, при влиянии на него поля, осуществляется с помощью электродвижущей силы (ЭДС), а направление движения определяется правилом правой руки. С поворотом в другую сторону, поворачивается и ЭДС. С помощью щеток коллектор осуществляет соединение с витковыми сторонам, что удаляет пульсирующее напряжение и приводит к образованию электротоковой величины. Пульсация снижается с помощью добавочных витков.Механическая характеристика двигателя постоянного тока с параллельным возбуждением
[caption id="attachment_3766" align="alignleft" width="459"] Схема включения ДПТ с последовательным возбуждением[/caption] Ротор привода (М) и катушка(LM) характерны последовательным включением. Они питаются от общего источника под буквой U. Электроток от ротора Iя – это и возбуждающий Iв. Описанная выше схема определяет единственный фактор, отличающий прибор с последовательным видом подключения. Обмотка возбуждения двигателя с ПВ, обозначенная на рисунке как LM, имеет такое же сечение, как и катушка в якоре. Когда ротор приходит во вращение, в его намотках действует электродвижущая сила (ЭДС) под буквой Е. На схеме видно, что ЭДС двигается навстречу к направлению U. В этом и заключается двигательный режим. Величина Е вычисляется с помощью угловой скорости электропривода (ω), магнитного потока (Ф), конструктивного коэффициента (k=(p*N)/(2*π*a), в котором р – пары полюсов, N – активные проводники катушек, а – параллельные ветки обмоток ротора)):
Схема включения ДПТ с последовательным возбуждением[/caption] Ротор привода (М) и катушка(LM) характерны последовательным включением. Они питаются от общего источника под буквой U. Электроток от ротора Iя – это и возбуждающий Iв. Описанная выше схема определяет единственный фактор, отличающий прибор с последовательным видом подключения. Обмотка возбуждения двигателя с ПВ, обозначенная на рисунке как LM, имеет такое же сечение, как и катушка в якоре. Когда ротор приходит во вращение, в его намотках действует электродвижущая сила (ЭДС) под буквой Е. На схеме видно, что ЭДС двигается навстречу к направлению U. В этом и заключается двигательный режим. Величина Е вычисляется с помощью угловой скорости электропривода (ω), магнитного потока (Ф), конструктивного коэффициента (k=(p*N)/(2*π*a), в котором р – пары полюсов, N – активные проводники катушек, а – параллельные ветки обмоток ротора)):E = k*Ф*ω
Якорный электроток Ія и Е (а точнее, их направление) на рисунке выше изображено для режима машины. Значения, допустимые для роторного тока, имеют некоторые ограничивающие условия. Это условия коммутации и прочности якоря. В целом, значение такого тока не должно быть выше стандартного Іян, чем в 2,5 раза, т.е.: Ія дополнительное ≤ 2,5 Iя ном. Согласно уравнению равновесных напряжений, в действующем состоянии агрегата напряжение U, которое приложено к цепи ротора, уравновешивает снижение напряжения в этой цепи (ІяRяц) и ЭДС вращения Е:U = ІяRяц + Е
Rяц = Rя+Rдп+Rко+Rв+Rп. Это формула суммарного сопротивления цепи якоря. Все пять показателей означают:- Rя – намотка якоря;
- Rдп – намотка добавочных полюсов;
- Rко – катушка компенсации;
- Rв – обмотка возбуждения;
- Rп – пусковой реостат.
Iя = (U-E)/Rяц
Когда ЭДС равна нулю (как правило, в режиме пуска), ток якоря превышает допустимый диапазон значений. Чтобы ограничить пусковой электроток, используют пусковой реостат. Rп должна попадать в диапазон Iя пусковой ≤ Iя дополнительный. Для получения аналитического выражения, с использованием которого можно вычислить параметры ДПТ, за основу нужно взять уравнение равновесия напряжений. Вместо Е (ЭДС вращения) туда нужно подставить ее значение и решить то, что получилось относительно скорости. Итог – значение зависимости темпа привода ω от электротока Iя ω=f(Iя). Это выражение получило название электромеханической характеристики, а выглядит оно так:ω = (U/kФ) - (Iя Rяц/kФ)
Последовательное включение якоря машины говорит о том, что Ф (магнитный поток, который создает упомянутая катушка) – это функция Iя. Ф = f(Iя) – это зависимость, получившая название «кривая намагничивания». Она нелинейная, характер по типу зоны насыщения. Аналитическое описание это кривой пока не дели, так что аналитически точно описать черты машины постоянного тока с ПВ невозможно. Если пренебречь насыщением магнитной системы и сделать предположение о том, что существует линейная зависимость между магнитным потоком Ф и якорным электротоком Iя (коэффициент пропорциональности при этом – α), т.е. Ф=αIя, то вычисление вращающего момента будет выглядеть вот так:М=k*Ф*Ія=k*α*Ія*2
Значение Ія при этом будет таким: Если подставить в уравнение, которые вычисляет электромеханические значения значение якорного тока, то свойства будут называться механическими, а выглядеть так:
Если подставить в уравнение, которые вычисляет электромеханические значения значение якорного тока, то свойства будут называться механическими, а выглядеть так:  при этом, А=U/k*α; В= Rяц /(k*α) – константы. Если проанализировать уравнение механистической характеристики, получим следующее:
при этом, А=U/k*α; В= Rяц /(k*α) – константы. Если проанализировать уравнение механистической характеристики, получим следующее:- ось ординат – асимптота кривой;
- в области значений малых моментов ось ординат обладает большей крутизной.
 Механические характеристики двигателя постоянного тока последовательного возбуждения[/caption] Чтобы построить такую характеристику, достаточно использовать универсальные параметры, которые, зачастую, приводятся в каталоге серии. Они представлены в виде зависимостей n=f(Iя), а также М= f(Iя), единицы при этом относительные. Если вы знаете номинальные значения привода, его свойства легко определить в абсолютной величине. Особенность естественных черт – резкий рост скорости с одновременным уменьшением момента сопротивления (Мс). Эта особенность является главной причиной того, почему ДПТ с ПВ никогда не включают, когда момент сопротивления меньше 15/20% от Мн. Ведь в этом случае темп мотора может быть выше, чем ω дополнительное = 2,5ω номинальное. Объясняется эта особенность во время рассмотрения процессов в приводе, когда нагрузка начинает уменьшаться. Например, машина, работая в точке А на естественных параметрах (скорость = ω1). Если Мс1 уменьшиться до Мс2, то появится положительный момент МД, а сам электродвигатель начнет действовать с большей скоростью. В ДПТ с последовательным возбуждением ЭДС вращения – это функция:
Механические характеристики двигателя постоянного тока последовательного возбуждения[/caption] Чтобы построить такую характеристику, достаточно использовать универсальные параметры, которые, зачастую, приводятся в каталоге серии. Они представлены в виде зависимостей n=f(Iя), а также М= f(Iя), единицы при этом относительные. Если вы знаете номинальные значения привода, его свойства легко определить в абсолютной величине. Особенность естественных черт – резкий рост скорости с одновременным уменьшением момента сопротивления (Мс). Эта особенность является главной причиной того, почему ДПТ с ПВ никогда не включают, когда момент сопротивления меньше 15/20% от Мн. Ведь в этом случае темп мотора может быть выше, чем ω дополнительное = 2,5ω номинальное. Объясняется эта особенность во время рассмотрения процессов в приводе, когда нагрузка начинает уменьшаться. Например, машина, работая в точке А на естественных параметрах (скорость = ω1). Если Мс1 уменьшиться до Мс2, то появится положительный момент МД, а сам электродвигатель начнет действовать с большей скоростью. В ДПТ с последовательным возбуждением ЭДС вращения – это функция:- скорости, которая увеличивается (ω);
- уменьшающегося потока (Ф).
Механические свойства двигателя, возбуждение которого независимо
В электроприводе с независимым включением катушка якоря подключается к отдельному источнику питания. В таком случает к цепи этой катушки включают реостат регулирования (rрег). К цепи якоря при этом подключают реостат пуска или добавочный реостат (Rп). [caption id="attachment_3770" align="aligncenter" width="380"]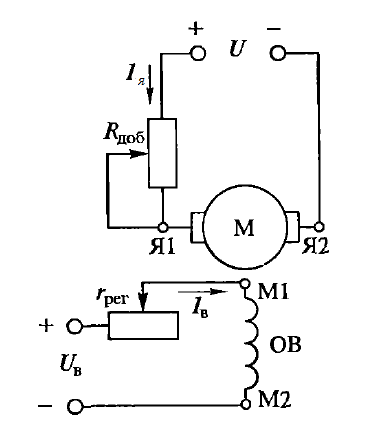 Схема двигателя постоянного тока независимого возбуждения[/caption] Характерное отличие двигателей с отдельным подключением заключается в независимости Iв от Iя. Это связано с тем, что намотка возбуждения получает отдельное питание. Уравнение, с помощью которого описывают ДПТ с отдельным включением намотки, выглядит следующим образом:
Схема двигателя постоянного тока независимого возбуждения[/caption] Характерное отличие двигателей с отдельным подключением заключается в независимости Iв от Iя. Это связано с тем, что намотка возбуждения получает отдельное питание. Уравнение, с помощью которого описывают ДПТ с отдельным включением намотки, выглядит следующим образом: 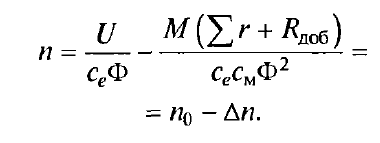 В этом уравнении n0 означает частоту, с которой вращается вал во время холостого хода, а Δn показывает то, как изменяется эта частота при возникновении нагрузки на мотор. Это уравнение доказывает прямолинейность параметров ДПТ с НВ, а также факт пересечения ими оси ординат в точке n0 (холостой ход). В то же время Δn (величина изменения частоты вращения вала машины при росте нагрузки на него) прямо пропорционально сопротивлению якорной цепи Ra =∑R + R добавочное. Следовательно, когда сопротивление якорной цепи наиболее низкое Ra = ∑R, т. е. R добав. = 0, величина перепада частоты вращения вала Δn тоже будет наименьшим. Параметры при этом будут жесткими (график 1).
В этом уравнении n0 означает частоту, с которой вращается вал во время холостого хода, а Δn показывает то, как изменяется эта частота при возникновении нагрузки на мотор. Это уравнение доказывает прямолинейность параметров ДПТ с НВ, а также факт пересечения ими оси ординат в точке n0 (холостой ход). В то же время Δn (величина изменения частоты вращения вала машины при росте нагрузки на него) прямо пропорционально сопротивлению якорной цепи Ra =∑R + R добавочное. Следовательно, когда сопротивление якорной цепи наиболее низкое Ra = ∑R, т. е. R добав. = 0, величина перепада частоты вращения вала Δn тоже будет наименьшим. Параметры при этом будут жесткими (график 1). 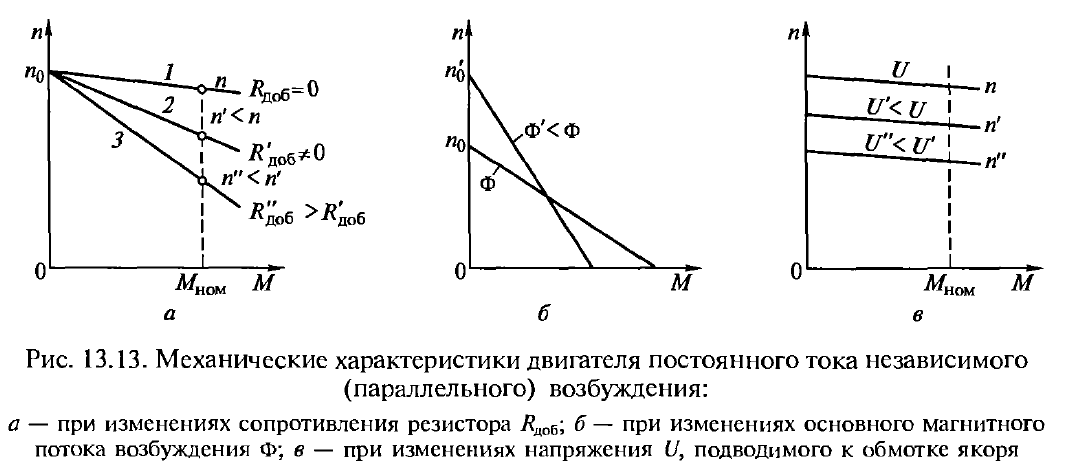 Как мы уже узнали из предыдущего раздела, естественными свойствами электромотора переменного тока называют такие характеристики, которые были получены при номинальном напряжении на намотках якоря и намотках возбуждения. Добавочное сопротивление при этом должно отсутствовать. Это показано на графике 1, где R добав. = 0. При изменении хотя бы одного из параметров, приведенных ниже, т.е. при несоответствии напряжения на катушках (якоря или возбуждения) их значениям, или когда сопротивление якорной цепи меняется посредством введения R добав., свойства становятся искусственными. Такие параметры, которые были получены посредством введения в якорную цепь добавочного сопротивления, еще называют реостатными (графики 2, 3). Оценивание регулировочных черт ДПТ опирается на парметры n = f(М). Если момент нагрузки на вал не изменяется, а добавочное сопротивление растет, частота будет уменьшаться. Вычисление добавочного R, помогающее получить механические признаки, что соответствуют необходимой частоте, с которой вращается вал, при некоторой нагрузке, как правило, номинальной для ДПТ с НВ происходит следующим образом:
Как мы уже узнали из предыдущего раздела, естественными свойствами электромотора переменного тока называют такие характеристики, которые были получены при номинальном напряжении на намотках якоря и намотках возбуждения. Добавочное сопротивление при этом должно отсутствовать. Это показано на графике 1, где R добав. = 0. При изменении хотя бы одного из параметров, приведенных ниже, т.е. при несоответствии напряжения на катушках (якоря или возбуждения) их значениям, или когда сопротивление якорной цепи меняется посредством введения R добав., свойства становятся искусственными. Такие параметры, которые были получены посредством введения в якорную цепь добавочного сопротивления, еще называют реостатными (графики 2, 3). Оценивание регулировочных черт ДПТ опирается на парметры n = f(М). Если момент нагрузки на вал не изменяется, а добавочное сопротивление растет, частота будет уменьшаться. Вычисление добавочного R, помогающее получить механические признаки, что соответствуют необходимой частоте, с которой вращается вал, при некоторой нагрузке, как правило, номинальной для ДПТ с НВ происходит следующим образом: 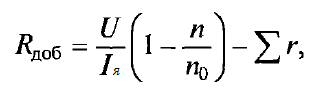 Как видно, формула требует знания напряжения в цепи якоря, В; электротока якоря при той нагрузке, которая была задана, А; требуемой частоты работы вала агрегата, оборотов/минута; частоты работы вала при холостом ходе, оборотов/минута. Частота вращения вала при холостом ходе – пограничная частота. Если ее превысить, то прибор автоматически перейдет в режим работы генератора. Такая частота выше стандартной на столько, на сколько величина стандартного напряжения выше номинальной электродвижущей якорной силы Eя. Нагрузка на машину при этом также носит номинальное значение.
Как видно, формула требует знания напряжения в цепи якоря, В; электротока якоря при той нагрузке, которая была задана, А; требуемой частоты работы вала агрегата, оборотов/минута; частоты работы вала при холостом ходе, оборотов/минута. Частота вращения вала при холостом ходе – пограничная частота. Если ее превысить, то прибор автоматически перейдет в режим работы генератора. Такая частота выше стандартной на столько, на сколько величина стандартного напряжения выше номинальной электродвижущей якорной силы Eя. Нагрузка на машину при этом также носит номинальное значение. 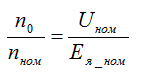 Следовательно,
Следовательно, 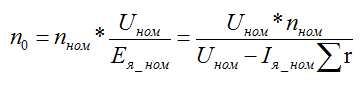
Форма характеристики зависит от величины Ф (основной магнитный поток). Если R резистора растет, то Ф уменьшается, а частота работы вала во время холостого хода растет. Вместе с этим растет и разница между частотами вращения вала.
Такой процесс неизбежно приводит к тому, что жесткость механической характеристики привода растет.
При изменении напряжения в якорной обмотке (с условием неизменности Rдоб и Rрег), следом измениться только n0. Перепад частоты будет таким же. Итог – смещение механистических параметров по оси ординат, но сохранение параллельности между ними.
Созданные условия считаются наиболее благоприятными для того, чтобы регулировать частоту вала агрегата изменением напряжения, которое подводят к якорной цепи. Этот способ регулирования частоты получил самое больше распространение во всем мире.
Механические параметры мотора со смешанным возбуждением
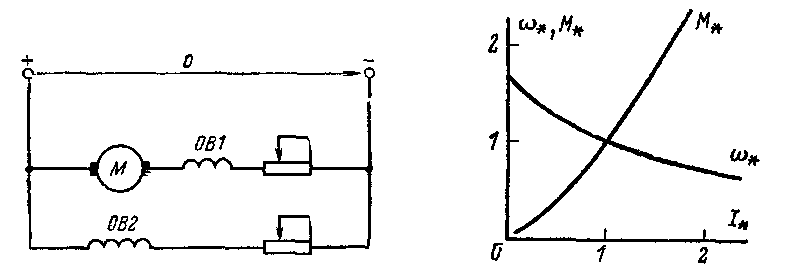 1. Принципиальная схема включения двигателя постоянного тока смешанного возбуждения. 2. Зависимость момен та М и угловой скорости ω*, от тока якоря I*, для двигателя постоянного тока смешанного возбуждения (в относительных единицах).
1. Принципиальная схема включения двигателя постоянного тока смешанного возбуждения. 2. Зависимость момен та М и угловой скорости ω*, от тока якоря I*, для двигателя постоянного тока смешанного возбуждения (в относительных единицах).В машине постоянного тока со смешанным возбуждением, как понятно из названия, есть две намотки: одна независимая (ОВ2), а вторая последовательная (ОВ1). Такая конструкция влияет и на свойства привода. Они находятся как бы посередине относительно ДПТ с последовательным и независимым возбуждением.
У электропривода со смешанным возбуждением нет аналитического выражения, что связано с изменением магнитного потока в случае уменьшения или увеличения нагрузки. Следовательно, расчет параметров обычно происходит с использованием естественной, которую можно найти в каталоге. Эти парметры можно увидеть на рисунке ниже. Электромотор со СВ, в отличие от ДПТ с ПВ, обладает темпом идеально холостого хода в качестве конечного значения. Этот темп определяет только магнитный поток, возникший от магнитодвижущей силы намотка, которая подключена отдельно (Ф0). Вычисляется она так:ω0 = U/kФ0
Соотношение магнитодвижущей силы независимых и последовательных обмоток отличается. Это значение зависит от серии, в которой был выпущен агрегат. Самым распространенным соотношением называют то, при котором МДС двух обмоток равны при условии номинального электротока. Темп у электропривода постоянного тока со СВ сильно изменяется в условиях малой нагрузки, а если увеличивать ее постепенно, то уменьшаться темп будет практически по прямой, аналогично двигателю с отдельным подключением обмоток. Связано это с тем, что большие нагрузки приводят к насыщению агрегата. В таком случае даже с изменением МДС катушек, подключенной последовательно, изменения магнитного потока совершенно не значительны. Чтобы рассчитать реостатные свойства можно применять метод построения характеристики для двигателя постоянного электротока с параллельным возбуждением обмоток, который мы рассмотрели выше. [caption id="attachment_3778" align="aligncenter" width="455"] Механические характеристики двигателя постоянного тока смешанного возбуждения для различных режимов работы[/caption] Торможение двигателя такого типа может проходить с помощью трех способов:
Механические характеристики двигателя постоянного тока смешанного возбуждения для различных режимов работы[/caption] Торможение двигателя такого типа может проходить с помощью трех способов:- когда энергия отдается в сеть;
- динамический;
- противовключение.
Бытовое и производственное применение подобных двигателей
Машины с упомянутым типом питания, в независимости от типа подключения обмотки, получили широкое распространение во всем мире. На производствах его используют в следующих устройствах и приборах:- грузоподъемные краны на разных тяжелых производствах;
- в приводах, которые требуют широкого диапазона регулирования скорости и высокого пускового момента (ими могут быть установки для подъема, различные станы (прокатные и обжимные);
- приводы в механизмах, обеспечивающих напор, натяжение или для поворота экскаваторов;
- в тяговых электромоторах (тепловозный и теплоходный транспорт, а также работающие в карьерах транспортные средства по типу самосвалов);
- электростартеры в автомобилях и тракторах. Чтобы уменьшить номинальное напряжение в стартере автомобиля, использую ДПТ, которые оборудованы четырьмя щетками. Они способствуют значительному уменьшению комплексного сопротивления в якоре. В статоре при этом четырехполюсной, а сила пускового электротока в таких стартерах составляет 200 А. Они действуют в кратковременном режиме.
- игрушки
- компьютерную технику
- организационную (офисную) технику
- инструменты с аккумуляторами.
