Шаговый двигатель – это разновидность бесколлекторного электромотора постоянного тока, предназначенного для преобразования электрических сигналов в дискретные механические движения. Чтобы не ошибиться, при подборе 3 фазного шагового двигателя нужно ориентироваться на некоторые важные параметры.Шаговыми двигателями принято называть электромеханические устройства, преобразующие электрические сигналы в механическое движение дискретного типа. Они относятся к бесколлекторным моторам постоянного тока и отличаются высокой эффективностью, надежностью и длительным сроком эксплуатации. Шаговые двигатели обычно используют там, где нужно организовать высокоточное позиционирование и контроль. Поэтому для нормальной работы здесь нужна более сложная схема функционального управления, коммутирующая все существующие обмотки. Да и сам шаговый двигатель современный может стоить на порядок дороже стандартного асинхронного или коллекторного электромотора. Хотя сейчас на производстве даже для управления коллекторными движками нередко используется дорогостоящее и сложное микроконтроллерное управление. Внешне 2 или 3 фазный силовой агрегат шагового типа похож на обычный электромотор, но имеет ряд важных отличительных свойств, обеспечивающих уникальность применения такого силового агрегата.
Преимущества и недостатки шагового электродвигателя
Принцип работы такого электромотора от обычного силового агрегата отличается тем, что угол поворота вала зависит от количества поступивших на агрегат импульсов. При запитанных обмотках в режиме остановки обеспечивается полноценный момент с позиционированием и возможностью дальнейшего повторения. Качественные современные модели могут обладать точностью от трех до пяти процентов от размера шага. Данная погрешность не имеет свойства пошагового накопления. Поскольку у шагового двигателя нет щеток, его можно быстро запускать, останавливать и переключать в режим реверсивного хода. Но срок его безотказной службы напрямую зависит от состояния подшипников. Позиционирование осуществляется без обратной связи. Можно даже подключить самодельный регулятор оборотов, например, чтобы обеспечивать оптимальную малую скорость редуктора для нагрузки, приложенной непосредственно к его валу. Диапазон перекрываемых скоростей шагового электромотора может быть достаточно обширным, а скорость вращения имеет пропорциональную зависимость от частоты импульсов на входе.Среди достоинств шаговых электродвигателей нужно особо отметить возможность скоростной регулировки и точного позиционирования без необходимости использования датчиков для связи обратной. Это важное преимущество, поскольку стоимость такого датчика современного образца может быть достаточно высокой. Но данный качественный потенциал полноценно раскрывается только в низкооборотистых системах с относительно постоянной загруженностью. При нагрузке выше величины момента данные о положении вала сбиваются, и системе уже требуется дополнительное базирование через концевой выключатель или другой подобный прибор. Оборудованные обратной связью системы такими недостатками не обладают. Они могут стабильно работать даже на высоких скоростях с периодической нагрузкой. Также имеется ряд других минусов шаговых электромоторов:
большая вероятность появления резонанса;
расход энергии не снижается при уменьшении нагрузки;
сложность работы и управления на высоких оборотах;
малая удельная мощность;
усложненная схема регулировки.
При проектировании некоторых систем такие электромоторы меняют на серводвигатели. Но для точного позиционирования в пределах допустимой скорости и момента лучше всего подходят именно двигатели шагового типа. При необходимости для увеличения момента здесь также можно задействовать понижающий редуктор, но такая методика применяется нечасто. В промышленном оборудовании, современной бытовой и автомобильной технике чаще задействуются коллекторные моторы. Тем не менее силовые агрегаты шаговые имеет свою стабильную область применения, в которой они незаменимы, например:
периферийное компьютерное оборудование;
устройства чтения и записи оптических дисков;
станковое оборудование с числовым программным управлением.
Помимо стандартных двухфазных моделей в быту и на производстве также используются трехфазные шаговые двигатели.
Особенности трехфазного шагового электромотора
От стандартного двухфазного варианта 3-х фазный шаговый силовой агрегат отличается способностью показывать более равномерный момент вращения. При этом вибрация ротора и уровень шума у него заметно ниже, а возможности ускорения и торможения реализуются лучше и быстрее. Также трехфазный ШД качественнее сохраняет момент на повышенных оборотах и для его подсоединения нужно всего три провода (двухфазный ШД обычно подключается четырьмя кабелями). Поэтому устройства такого типа нашли широкое применение там, где необходимо высокоточное позиционирование с низкой вибрацией и шумом.Это не имеющий щеток электромотор синхронного типа, к нескольким обмоткам которого подается электрический ток так, чтобы одна из запитанных статорных обмоток фиксировала положение ротора. Путем последовательного включения обмоток образуются так называемые шаги – перемещение ротора на определенный угол. Как уже было сказано выше, точное позиционирование вала можно получить даже без использования датчиков обратной связи. Но нужен специальный драйвер для шагового двигателя.Таким образом, среди достоинств моделей с тремя фазами можно отметить:
равномерность крутящего момента;
низкие показатели вибрации вала и шума;
лучшая способность торможения и разгона;
качественное сбережение момента работы на повышенных скоростях.
Собранные на основе трехфазных шаговых электромоторов электроустановки и приводы отличаются стабильной и эффективной работой, а также высоким моментом кручения. Сфера применения у них практически идентична двухфазным аналогам.
Чтобы правильно выбрать модель ШД, нужно учитывать ряд важных его параметров:
Мощность (кВт). Она постоянная и вычисляется путем умножения момента на скорость. Таким образом наблюдается обратно пропорциональная зависимость этих величин. На современном электротехническом рынке предлагается множество моделей с разными характеристиками, поэтому можно легко ошибиться;
Тип электромотора. Помимо рассматриваемых трехфазных моделей существуют также шаговые электромоторы биполярного, униполярного типа и прочие разновидности. 3-х фазные ШД характеризуются большими скоростными возможностями и меньшим крутящим моментом, чем аналогичные по размеру биполярные агрегаты. Благодаря лучшему сохранению момента их рекомендуется применять в скоростных передачах и приводах с редукторами. Биполярные моторы отличаются повышенным удельным моментом на низких скоростях и под них легче найти драйвер. Униполярные модели, по сути, состоят из нескольких биполярных ШД разного вида, гибко подключенных между собой с помощью обмоток;
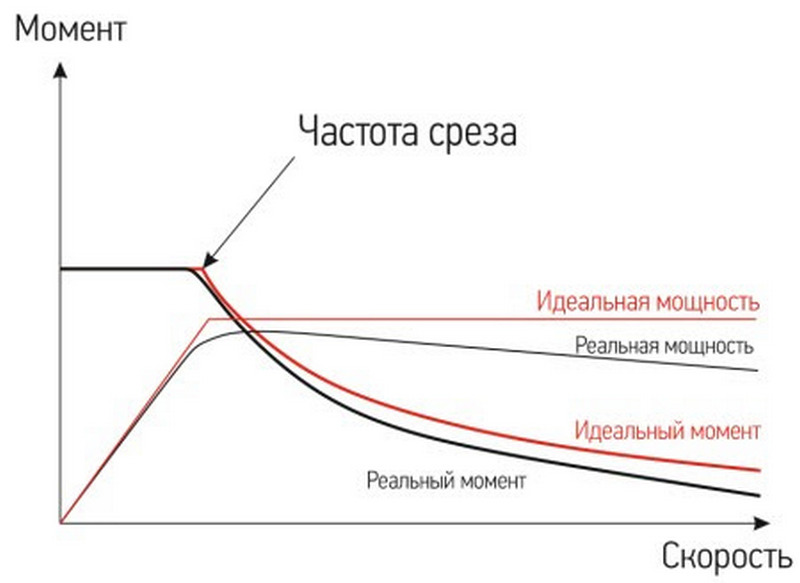
Зависимость скорости от вращающегося момента. На этот параметр при выборе шагового электромотора нужно обращать внимание в первую очередь. Существуют специальные графики, сверившись с которыми можно точно определить, подходит тот или иной конкретно взятый силовой агрегат под условия вашего технического задания;
Показатель индуктивности. Для его вычисления необходимо квадратный корень обмоточной индуктивности электромотора умножить на 32. Полученное значение должно быть максимально приближено к величине питающего напряжения вашего драйвера. При отклонении более тридцати процентов в большую сторону велика вероятность перегрева и появления шумов, а при недостаточной индуктивности будет наблюдаться стремительное снижение крутящего момента.
Также важно правильно подобрать габариты электромотора и диаметр его вала. Зачастую предлагаемые на рынке аналогичные по размеру шаговые двигатели от разных производителей обладают похожими параметрами. Как правило, именно габаритами агрегата определяется диапазон изменения его основной характеристики – графика зависимости скорости от момента. Величина тока на обмотках ШД косвенно связана с моментом вращения и определяет тип необходимого для его запуска драйвера, чтобы он мог генерировать именно такой уровень тока. От напряжения питания обмотки зависит допустимая величина подаваемого на мотор постоянного напряжения, а не показателя с применением широтно-импульсной модуляции. Также от этого косвенно зависит максимально возможный крутящий момент конкретно взятого шагового двигателя. https://youtu.be/BGG2oeOyQ74

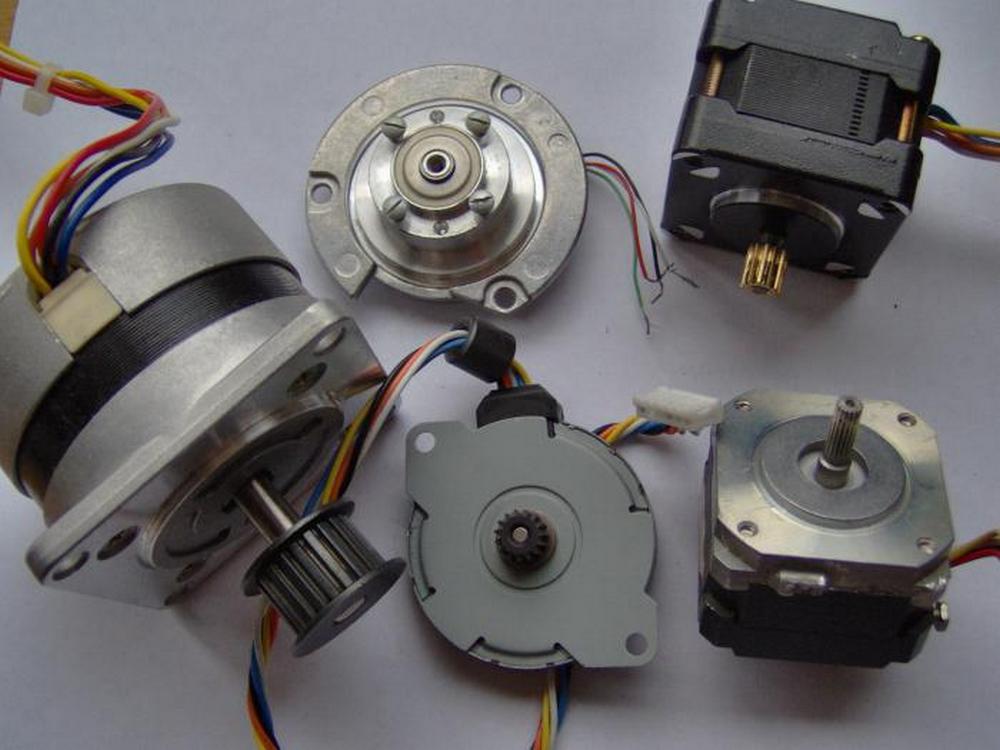 Шаговыми двигателями принято называть электромеханические устройства, преобразующие электрические сигналы в механическое движение дискретного типа. Они относятся к бесколлекторным моторам постоянного тока и отличаются высокой эффективностью, надежностью и длительным сроком эксплуатации. Шаговые двигатели обычно используют там, где нужно организовать высокоточное позиционирование и контроль. Поэтому для нормальной работы здесь нужна более сложная схема функционального управления, коммутирующая все существующие обмотки. Да и сам шаговый двигатель современный может стоить на порядок дороже стандартного асинхронного или коллекторного электромотора. Хотя сейчас на производстве даже для управления коллекторными движками нередко используется дорогостоящее и сложное микроконтроллерное управление. Внешне 2 или 3 фазный силовой агрегат шагового типа похож на обычный электромотор, но имеет ряд важных отличительных свойств, обеспечивающих уникальность применения такого силового агрегата.
Шаговыми двигателями принято называть электромеханические устройства, преобразующие электрические сигналы в механическое движение дискретного типа. Они относятся к бесколлекторным моторам постоянного тока и отличаются высокой эффективностью, надежностью и длительным сроком эксплуатации. Шаговые двигатели обычно используют там, где нужно организовать высокоточное позиционирование и контроль. Поэтому для нормальной работы здесь нужна более сложная схема функционального управления, коммутирующая все существующие обмотки. Да и сам шаговый двигатель современный может стоить на порядок дороже стандартного асинхронного или коллекторного электромотора. Хотя сейчас на производстве даже для управления коллекторными движками нередко используется дорогостоящее и сложное микроконтроллерное управление. Внешне 2 или 3 фазный силовой агрегат шагового типа похож на обычный электромотор, но имеет ряд важных отличительных свойств, обеспечивающих уникальность применения такого силового агрегата.  Среди достоинств шаговых электродвигателей нужно особо отметить возможность скоростной регулировки и точного позиционирования без необходимости использования датчиков для связи обратной. Это важное преимущество, поскольку стоимость такого датчика современного образца может быть достаточно высокой. Но данный качественный потенциал полноценно раскрывается только в низкооборотистых системах с относительно постоянной загруженностью. При нагрузке выше величины момента данные о положении вала сбиваются, и системе уже требуется дополнительное базирование через концевой выключатель или другой подобный прибор. Оборудованные обратной связью системы такими недостатками не обладают. Они могут стабильно работать даже на высоких скоростях с периодической нагрузкой. Также имеется ряд других минусов шаговых электромоторов:
Среди достоинств шаговых электродвигателей нужно особо отметить возможность скоростной регулировки и точного позиционирования без необходимости использования датчиков для связи обратной. Это важное преимущество, поскольку стоимость такого датчика современного образца может быть достаточно высокой. Но данный качественный потенциал полноценно раскрывается только в низкооборотистых системах с относительно постоянной загруженностью. При нагрузке выше величины момента данные о положении вала сбиваются, и системе уже требуется дополнительное базирование через концевой выключатель или другой подобный прибор. Оборудованные обратной связью системы такими недостатками не обладают. Они могут стабильно работать даже на высоких скоростях с периодической нагрузкой. Также имеется ряд других минусов шаговых электромоторов: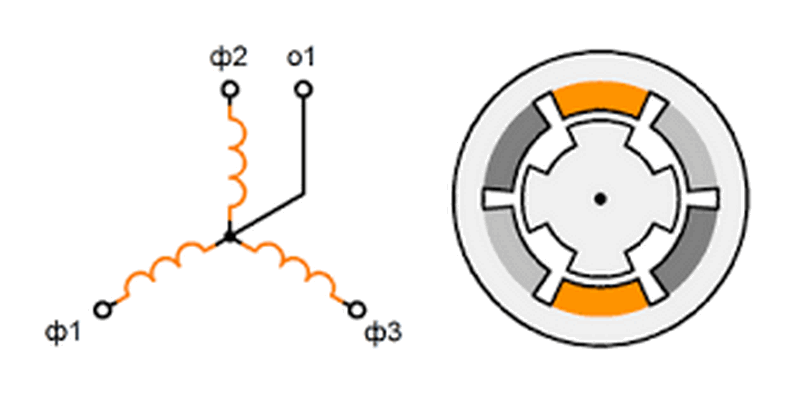 Это не имеющий щеток электромотор синхронного типа, к нескольким обмоткам которого подается электрический ток так, чтобы одна из запитанных статорных обмоток фиксировала положение ротора. Путем последовательного включения обмоток образуются так называемые шаги – перемещение ротора на определенный угол. Как уже было сказано выше, точное позиционирование вала можно получить даже без использования датчиков обратной связи. Но нужен специальный драйвер для шагового двигателя. Таким образом, среди достоинств моделей с тремя фазами можно отметить:
Это не имеющий щеток электромотор синхронного типа, к нескольким обмоткам которого подается электрический ток так, чтобы одна из запитанных статорных обмоток фиксировала положение ротора. Путем последовательного включения обмоток образуются так называемые шаги – перемещение ротора на определенный угол. Как уже было сказано выше, точное позиционирование вала можно получить даже без использования датчиков обратной связи. Но нужен специальный драйвер для шагового двигателя. Таким образом, среди достоинств моделей с тремя фазами можно отметить: