Шаговые электродвигатели являются одними из распространенных моделей на отечественном рынке. Это обусловливается преимуществами, которые обеспечивает данный мотор, а также относительной простотой эксплуатации. Чем же интересны агрегаты на 4 вывода? Рассмотрим далее с нашей сегодняшней статье. [caption id="attachment_4459" align="aligncenter" width="550"]

NEMA 34[/caption]
Подключение шагового двигателя с помощью 4 выводов
Шаговый электрический двигатель – машина, основное назначение которой – преобразовывать электрическую энергию, поступающую от сети питания в энергию для механического движения. Конструкция имеет ряд своих особенностей, о которых мы расскажем далее, но, в целом компоновка включает стандартные детали. Среди них стоит выделить статор, его обмотки, а также ротор (магнитомягкий или магнитотвердый). Ключевой параметр силового агрегата данного типа – обеспечение вращения дискретного типа, показатель которого равен точному количеству заданных импульсов. Последнему показателю соответствует в свою очередь количество осуществляемых шагов. Чаще всего применение шагового мотора с 4 выводами имеет место в обрабатывающих станках с ЧПУ, роботизированном оборудовании, приборах для хранения, считывания и обработки информации. [caption id="attachment_4464" align="aligncenter" width="594"]
Шаговый двигатель[/caption]
Особенности функционирования
Если сравнивать моторы данного вида с другими типоразмерами, стоит отметить, что детали шаговых моторов совершают обороты пошагово, а не непрерывно. Каждый отдельный шаг является определенной частью каждого полного оборота. Точное число требуемых шагов для полноценного оборота вала будет отличаться в каждой отдельной ситуации. Особенность зависит схемы соединения, марки силового агрегата, способа управления мотором. Конструкция и принцип функционирования
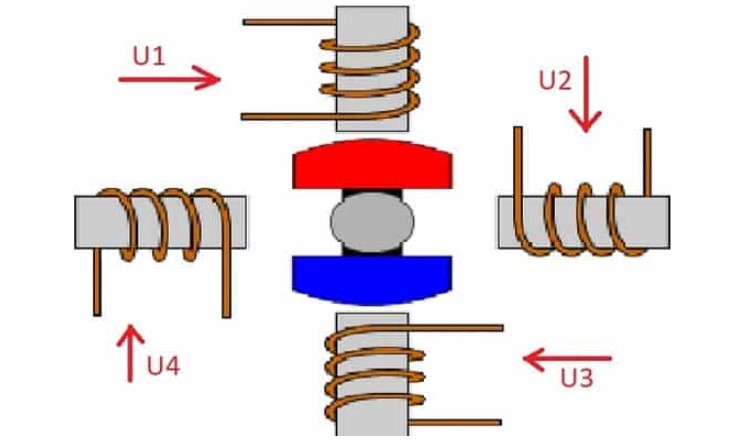
Ниже на рисунке вы видите схему общей компоновки электрического двигателя шагового типа. Первое, что замечается – это 4 обмотки, относящиеся к моторному статору, расположение их позволяет им находиться по отношению друг к другу под прямым углом. Исходя из этого, можно смело говорить о том, что машина имеет шаг размером в 90 градусов. Когда осуществляется подача напряжения типа U1 на первую обмотку, ротор начинает перемещаться опять же на 90 градусов. Когда же реализуется подача напряжения поочередным способом на остальные обмотки U2, U3, U4, то вал продолжает вращаться, до окончательного завершения полного круга. Дальше цикл повторяется заново по аналогичному алгоритму. Для того, чтобы изменить направленность оборотов мотора, достаточно просто поменять порядок подачи импульсов на определенные медные намотки. Подключение шаговых двигателей
Конструкции силовых агрегатов данного типа бывают разные, каждый из которых следует учитывать при выборе конкретной схемы. Для того, чтобы произвести запитывание обмоток, требуется устройство, способное выдавать импульс управляющего типа или даже их серию, в четко заданной последовательности. Для этого в большинстве приложений используют приборы полупроводникового действия, для присоединения мотора шагового типа. Известны эти детали как микропроцессорные драйверы. Каждый из них обладает своими клеммами, определяющих методы питания и рабочие режимы. Исходя из применяемой схемы подключения, необходимо применять выводы шагового устройства, которые также представлены различными модификациями. Используя отдельно каждый из вариантов подсоединения разнотипных клемм к сигналу выходного типа, вы получаете в результате определенный показатель скорости вращения, шаг или даже микрошаг перемещений в рабочей плоскости. Это довольно удобно, ведь для решения одного типа задач требуется низкая частота, для других – высокая. Один и тот же силовой агрегат имеет возможность задавать требуемую характеристику посредством драйвера. В процессе используется гибкий кабель, обеспечивающий универсальность создаваемого соединения. Типичные схемы
Исходя из того, какое количество выводов имеет мотор, отличаются возможности применения определенных схем подключения. 4 фазы, 5 или 6 – каждая модификация обладает своими особенностями. В нашей сегодняшней статье нас интересует подсоединение шагового двигателя на 4 провода, остальные вариации мы рассмотрим в других описаниях. Каждая схема подразумевает наличие группы выходных клемм, которые собственно и отвечают за формирование рабочих режимов и способов подачи напряжения питания. Учитывая конкретную схему, стоит применять определенные для каждой ситуации выводы двигателя. Всего существует 6 ключевых схем для соединения мотора:- принципиальная;
- биполярная;
- биполярная, с реализованным отводом и центральной обмоточной частью;
- униполярная, с реализованными четырьмя фазами и возможностью присоединения пары намоток;
- 4-х фазный униполярный способ с подключением параллельного типа;
- с последовательным присоединением.
[caption id="attachment_4460" align="aligncenter" width="512"]
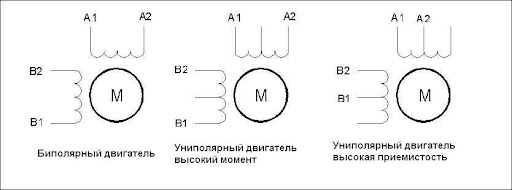
Схемы биполярных ШД[/caption]
В ситуациях, когда запитка ключевых полюсов шагового агрегата осуществляется от одного и того же драйвера, по примененным схемам можно выделить основные особенности работы, отличающие каждую конкретную схему. К этим параметрам относят:- выводы обязательно подключаются к соответствующим клеммам прибора. Когда соединение последовательное, то индуктивность обмоток возрастает, параллельно снижается ток;
- обеспечение паспортных значений электрических параметров. Параллельная схема увеличивает уровни тока и снижает индуктивность;
- при реализации соединения по одной фазе на каждую намотку, происходит снижение момента при работе на низких оборотах, вместе со снижением величин токов;
- осуществление всех электрических и динамических параметров, в полном соответствии с паспортными характеристиками. Относятся к этим значениям и номинальные токи. Благодаря этому, существенно упрощается управленческая схема;
- выдача на порядок большего крутящего момента, возможность применения с большим диапазоном частот вращения;
- увеличение момента вращения, но, для оборудования, работающего на низких частотах вращения.
Принципиальная схема
Схематически данный вариант присоединения выглядит так: [caption id="attachment_4463" align="aligncenter" width="635"]
Принципиальная схема шагового двигателя[/caption]
Чтобы обеспечить бесперебойную работу шагового электродвигателя, необходимо знать все нюансы передачи номинальных напряжений, скорости крутящего момента, а также о снижении уровней линейного напряжения. Реализуется также подключение силового агрегат к Ардуино. Здесь все выходы управления с драйвера совмещаются с цифровыми контактами Arduino Uno.Ардуино
Для упрощения восприятия, давайте рассмотрим данный вопрос на примере конкретной модели мотора, пускай это будет 28BYj-48. Двигатель представляет собой униполярный агрегат, который мы совместим с драйверами L298 и ULN2003. Схематически это выглядит так (L298): [caption id="attachment_4462" align="aligncenter" width="649"]
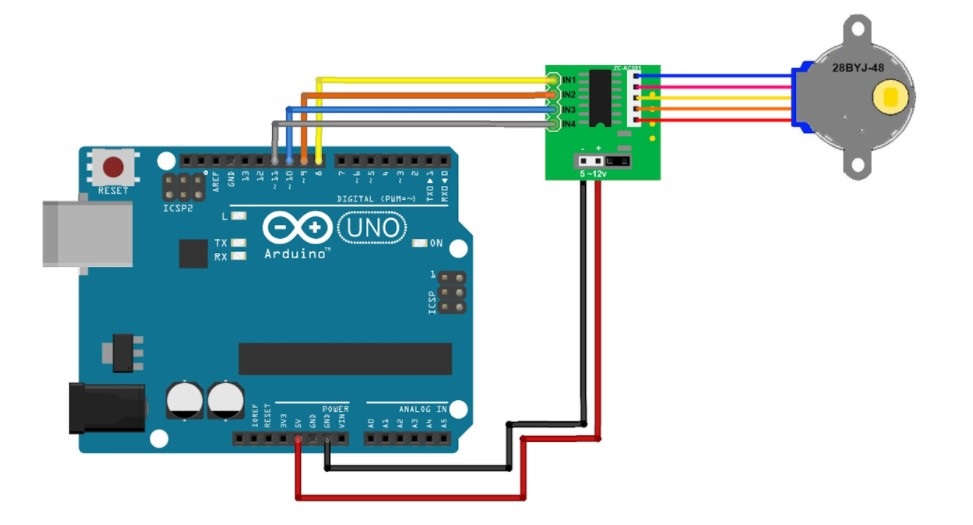
Подключение Ардуино[/caption]
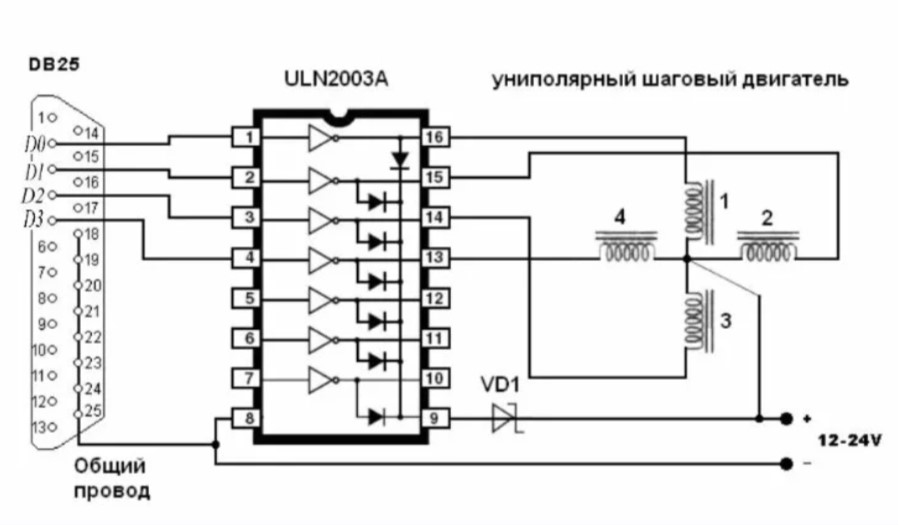
Для драйвера ULN2003 схема выглядит следующим образом: [caption id="attachment_4461" align="aligncenter" width="514"]
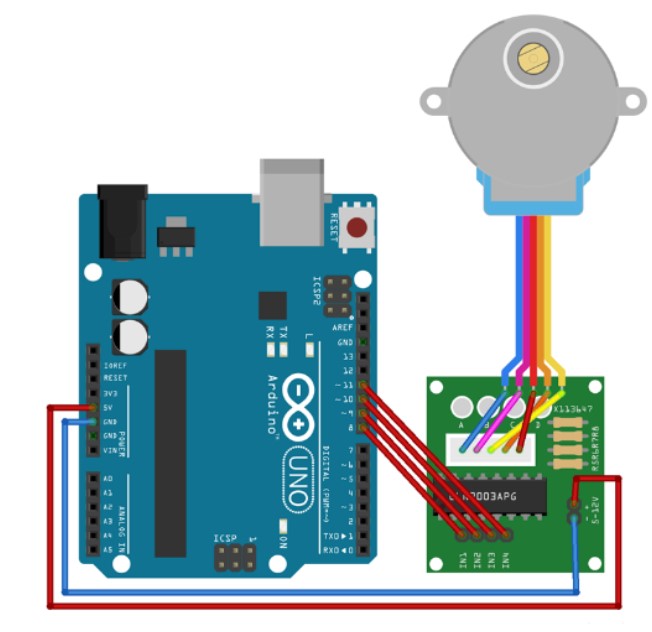
Подключение ULN2003[/caption]
Здесь выходы управляемого действия подсоединяются к цифровым контактам Ардуино, независимо от типа. На схеме включения в этой конкретной ситуации используются контакты типа 8-11. Электропитание подводится к 5 вольтам. Рекомендовано применять источник питания отдельный, для избегания перегревания платы. Драйвера
Для того, чтобы эффективно включить и запустить 4-х жильный двигатель, необходимо применять драйвера. О них мы уже писали ранее, а сейчас давайте вкратце рассмотрим их особенности. Приборы работают в биполярном режиме, что обусловливает такие основные преимущества:- увеличение показателя момента вращения на уровень до 40%, если сравнивать с униполярными модификациями;
- разнообразие в использовании моторов разных конфигураций обмотки фаз.
https://youtu.be/HO6OyDcWj8s
Из недостатков биполярного режима работы стоит выделить разве что сложность технической реализации самого драйвера для агрегата с 4 выводами. Каждую обмотку стоит отдельно подсоединять к источнику питания, отключать. Здесь лучше всего устанавливать мост-схему с 4 ключами. Рассмотрим же самые функциональные варианты драйверов, которые мы уже упоминали выше.На базе L298N
Драйвер мостового типа разработан для эффективного регулирования двигателей с номинальным током до 2 ампер и напряжением питания до 46 вольт. Модуль, изготовленный на основе L298N включает такие детали:- непосредственно микросхему аналогичного типа;
- механизм охлаждения;
- стабилизатор уровня напряжения;
- защитные диоды;
- колодки клеммов;
- разъемы для присоединения приемников сигналов.
ULN2003
Доступность и низкая стоимость реализации – основные параметры, определяющие распространенность данных устройств регулирования. Справедливости ради отметим, что выходят они из строя чаще, чем вышеописанные модификации, но, при этом, легко подлежа восстановлению. Виды драйверов
Вкратце расскажем о типах деталей ШД с 4 выводами, которых всего есть 2:- которые повторяют формы сигналов. В процессе своей работы они не формируют импульсы, лишь только повторяют их для обеспечения эффективного управления. Генерированию сигналов – это специализация микроконтроллеров. Как раз к таким драйверам и относится чип L298;
- формирующие сигналы. Их установка сводит к минимуму необходимость в применении микроконтроллеров, ведь достаточно просто задать периодический прямоугольный сигнал (меандр) и подобрать оптимальный рабочий режим. А 4988 – один из примеров такого драйвера.
[caption id="attachment_4465" align="aligncenter" width="520"]
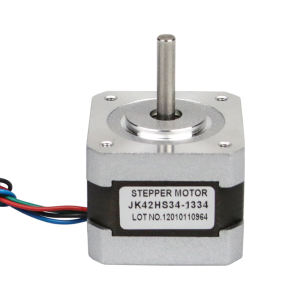
Nema 17 JK42HS34-1334-01[/caption]
Сильные и слабые стороны
Осуществив правильное подключение шагового силового агрегата на 4 вывода, вы довольно быстро оцените все преимущества конструкции:- показатель угла поворота полностью соответствует количеству поданных электрических импульсов. После торможения, обороты сохраняют максимальный момент и фиксацию;
- точность позиционирования. Показатель обеспечивает установленный шаг в доле 3 – 5%, с возможностью накопления;
- высокая скорость старта, обратного вращения (реверса), остановки;
- отсутствие контактных компонентов для съема тока, обеспечивает высокую надежность, ведь детали не трутся и, следовательно – не изнашиваются;
- нет необходимости в обратной связи для обеспечения позиционирования;
- возможность работы на низких оборотах для нагрузки, подведенной напрямую. При этом не применяются редукторы;
- относительно меньшая цена;
- широкий спектр управления скоростью валовых вращений, благодаря изменениям частот электроимпульсов.
Недостатков на порядок меньше, справедливости ради укажем и их. К слабым сторонам относятся:- возможность возникновения «эффекта резонанса» и дальнейшего проскальзывания шагового мотора при работе;
- отсутствие обратной связи может вызвать потерю контроля над двигателем;
- энергия расходуется на стабильном уровне, независимо от наличия на агрегате нагрузки;
- особенности схем вызывают затруднения в их реализации и дальнейшей поддержке работоспособности.
Модельный ряд
Сейчас давайте рассмотрим функциональные компоненты, которые поддаются подключению по вышеописанным схемам. Nema 17 JK42HS34-1334-01 – мотор, поставляемый с проводами, обладает шагом 1,8 градусов. Исходя из этого, 1 полный оборот составляет 200 шагов. Основные технические параметры:- 2 фазы;
- уровень номинального напряжения х 2,8 В;
- фазовое сопротивление – 2,1 Ом;
- 22 мм – длина вала;
- 2,5 мГн – индуктивность каждой фазы.
Nema 23 – более совершенная версия шагового мотора, шаг аналогичный предыдущей модели – 1,8˚. Номинальный ток – 2 ампера, диапазон рабочих температур: -20 - +85 градусов. Комплектуется проводом, длина которого – 80 см. Уровень сопротивления фазы – 2,6 Ом., напряжение – 5,2 вольта. [caption id="attachment_4458" align="aligncenter" width="364"]

NEMA 23[/caption]
NEMA 34 – одна из самых функциональных серий таких моторов, как и любые другие линейки, включает несколько функциональных моделей и подходящих уникальных комплектующих. В некоторых модификациях реализованы энкодеры, и другие вспомогательные компоненты. Модель 86BYGH1182 к примеру, относится к биполярному типу, имеет 2 обмотки и 4 вывода. Устанавливается на принтерах, станках ЧПУ и другом пром. оборудовании. https://youtu.be/Jw3DHiO2VPw

