Подключение электрического шагового двигателя на 6 выводов имеет свои технические особенности, которые стоит учитывать при осуществлении монтажа. Правильно реализованные соединения обеспечат продуктивность и надежность работы мотора, управления производственным оборудованием. [caption id="attachment_4451" align="aligncenter" width="600"]
Двигатель NEMA 23 57HM56-2006[/caption]
Шаровые электродвигатели довольно часто используются в отечественной промышленной отрасли, что обусловливается высокими эксплуатационными показателями агрегатов. В процессе работы они выдают хороший крутящий момент, демонстрируют устойчивость к разнотипным воздействиям, а также на порядок медленнее поддаются износу. Конструкция включает основные детали: статор и ротор, последний - магнитного типа бывает мягкого или твердого исполнения. Общие параметры
Шаговый двигатель представляет собой силовой агрегат бесколлекторного типа, вращения ротора которого осуществляются дискретным способом, то есть шагами. Это – ключевая отличительная черта устройств, заметно выделяющая их среди других популярных моделей. Полное вращение якоря включает в себя несколько шагов. При изменении формы сигнала, числа импульсов, а также их продолжительности и фазового сдвига, параллельно меняются направленность оборотов и точное число вращений ротора. Статор мотора включает магниты, роторные же части взаимодействуют с магнитными элементами, изготавливаются из разнотипных материалов:- магнитомягких – для реактивных двигателей;
- магнитотвердых – для моторов с постоянными магнитами.
Разновидности моторов
Шаговые моторы на 6 выводов, как и другие версии таких агрегатов, классифицируются на такие категории:- с постоянными магнитами. Они оборудованы роторами, конструкция которых подразумевает наличие магнитов постоянного действия. Детали взаимодействуют со статорными электромагнитами, тем самым создавая крутящий момент;
- реактивный мотор. Также часто их называют шаговыми двигателями с переменным магнитным сопротивлением. Ротор не подразумевает наличия постоянных магнитов, компонент изготовлен из магнитомягкого материала в форме звезды;
- гибридный. В конструкции этого мотора с 6 выводами реализованы технические особенности двух вышеописанных версий. Ротор как в первом случае, изготавливается из магнитотвердых материалов, но, внешне имеет вид звезды. Количество шагов в одном обороте напрямую определяется числом постоянных магнитов на роторной звезде. 1 вращение может иметь до 400 шагов (то есть 1 шаг – приблизительно 0,9˚).
[caption id="attachment_4450" align="aligncenter" width="468"]
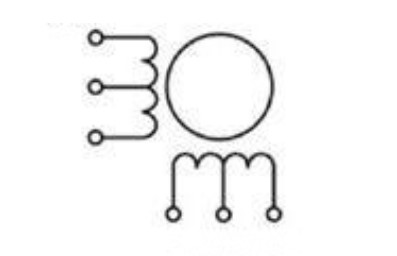
6-ти выводной двигатель[/caption]
Подключение
Как подключить шаговый мотор на 6 контактов, чтобы он работал со всеми своими возможностями? Осуществить это достаточно просто, главное – знать все тонкости процесса и точно следовать требованиям и рекомендациям. Прежде всего, нужно запитать намотки, при помощи полупроводникового прибора. Главная его задача – выдавать импульсы управления в заданной последовательности. Также нередко устанавливаются драйверы – детали, о которых мы расскажем чуть позже. Они обладают определенным набором клемм, каждая из которых отвечает за обеспечение режима работы и способа электропитания Аналогично с моделями четырехконтактного типа, двигатели на 6 проводов обладают парой кабелей для каждой отдельной намотки. Из особенностей выделим наличие центрального вывода для каждой отдельной катушки. Это позволяет осуществлять подключение мотора в одном из двух применений:- в качестве однополярного силового агрегата;
- биполярного.
Перед началом подключения необходимо разделить провода электроподключения на 3 класса, замкнутые между собой. Осуществить это проще всего и эффективнее, с помощью тестера. Далее, после разделения, следует обнаружить центральные выводы. Необходимо использовать сразу все 6 проводов, если нужно подсоединить электрический двигатель к драйверу однополярного типа. Соединение же с биполярным драйвером требует уже применения всего одного разъема провода с единственным выводом и имеющегося центрального выхода, для отдельной совместимости с каждой намоткой. Конструктивные особенности подключения агрегатов с 6 выходами по большей части совпадают с параметрами пятиконтактных моделей. Основное отличие – внутренняя закрытость центральных выводов, и, как следствие – соединение в 1 провод. Благодаря этому, электродвигатель может работать только при помощи однополярного механизма. Определение намоток здесь происходит почти интуитивно, прежде всего, лучше идентифицировать центральный ввод, ведь уровень его сопротивления является половиной от аналогичных показателей других кабельных соединений. Пример подключения
Рассмотрим же практическое подключение 6-ти выводного двигателя к сети, на примере имеющейся модели. Возьмем двигатель NEMA 23 57HM56-2006 униполярной конструкции. Модель имеет ток 2 ампера, из-за чего обыкновенный драйвер для такого типа шаговых двигателей А4998 не будет полезен. Можно его заменить на более функциональную версию ШД ТА 6600 с управленческой платой MKS CD 57/86, для более стабильного подключения. Биполярный мотор обладает одной обмоткой на каждой фазе, которая в процессе работы меняет свою полюсность при помощи драйвера. Необходимо устанавливать драйвер мостового типа, или же полумостовой, но с питанием двухполярного типа. При реализации биполярного двигателя, мы будем иметь две намотки и уже четыре вывода. Если проводить параллель между биполярным и униполярным моторами, то первый обладает на порядок большей удельной мощностью. При условии одних и тех же габаритных размеров, биполярные моторы в процессе эксплуатации выдают больший крутящий момент. Вот пример двух модификаций: [caption id="attachment_4453" align="aligncenter" width="533"]
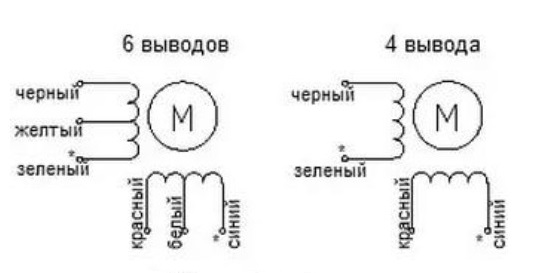
Примеры двух обмоток[/caption]
Униполярный двигатель можно подсоединить к драйверу и, не используя центральные выводы в катушках – белый и желтый. Таким образом получится обеспечить высокий момент вращения. [caption id="attachment_4452" align="aligncenter" width="368"]
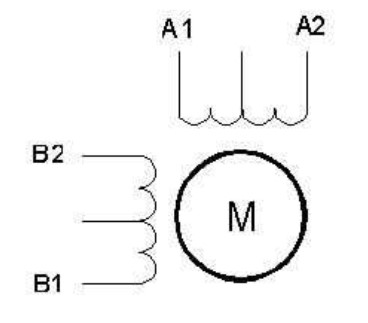
Высокий момент униполярного двигателя[/caption]
Драйверы
Неотъемлемый компонент для подключения шагового мотора на 6 проводов – драйвер. Эти приспособления классифицируются на 2 основные категории:- копирующие форму исходящих сигналов. В процессе эксплуатации данные приборы самостоятельно не генерируют сигналы, а только дублируют их форму, с целью обеспечения управления двигателем. За создание импульсов отвечают микроконтроллерные элементы, такие как Ардуино. Самый популярный пример такого драйвера – Motor Shiled в основе которого лежит плата L298;
- формирующие сигналы. Более функциональные драйверы, использование которых позволяет обходиться без микроконтроллеров. Для работы необходимо всего задать прямоугольный сигнал и подобрать подходящий рабочий режим. Модель – А4988.
Вывод
Подключить ШД на 6 выводов – задача несложная, главное – подобрать подходящие драйверы и соблюдать правила схемы электрического подключения. https://youtu.be/FXR9ExRAzVQ

