
 Содержание: 1.Устройство шагового двигателя. 2.Подключение и автоматическое управление. Общее положение. 3.Платформа Ардуино. 4.Драйвера. 5.Подключение платы. 6.Варианты управления (онлайн-версия, автономный режим). 7.Библиотеки и дополнительные ядра. 8.Устранение неполадок. 9.Подсоединение двух шаговых электродвигателей к плате. 10.Шаговый двигатель с энкодером. Подключение к Ардуино. 11.Уход за платой.
Содержание: 1.Устройство шагового двигателя. 2.Подключение и автоматическое управление. Общее положение. 3.Платформа Ардуино. 4.Драйвера. 5.Подключение платы. 6.Варианты управления (онлайн-версия, автономный режим). 7.Библиотеки и дополнительные ядра. 8.Устранение неполадок. 9.Подсоединение двух шаговых электродвигателей к плате. 10.Шаговый двигатель с энкодером. Подключение к Ардуино. 11.Уход за платой. УСТРОЙСТВО ШАГОВОГО ДВИГАТЕЛЯ.
Шаговый двигатель - бесколлекторный механизм синхронного типа. Как все электрические моторы преобразует электроэнергию в механическую работу. Конструкция проста, представлена статором и ротором. На статоре есть некоторое число обмоток, переключение которых дает поворот вала на заданный угол, есть его четкая зависимость от количества шагов. Ротор изготавливается из магнитного материала, мягкого или твердого. В зависимости от исполнения наводится определенный момент вращения. Движение привода происходит за счет смены полярностей разности потенциалов и переключений катушек соответственно схеме. Положений вала ротора может быть бесчисленное количество, они разнятся лишь долей радиального градуса. Шаговые двигатели по конструктивному исполнению деталей разделяют на типы. Для ротора: с активным, с пассивным, с гибридным. Для статора: биполярные, униполярные, четырехвыводные, шестивыводние и восьми выводные. Одним из значимых показателей шагового двигателя является частота приемистости. Это максимальная частотность непрерывных последовательных сигналов, когда ротор синхронизируется без шаговых потерь. Уменьшается с расширением хода. Скорость действия ШД определяется скоростью течения электромагнитных процессов, переключением импульсов напряжения между фазами статора. Фаз может быть разное количество, чаще выполняют три или четыре. Методы регулировки помогут подобрать необходимый режим работы. В зависимости от целевого переключения обмоток подачей напряжения различают несколько видов: волновая, симметричная, потенциальная, импульсная.ПОДКЛЮЧЕНИЕ И УПРАВЛЕНИЕ. ОБЩЕЕ ПОЛОЖЕНИЕ.
Подключение двигателя производится через драйвер. Это силовой модуль, выдающий определенные импульсы напряжения на устройство. Структурно представляет собой транзистор. Микросхема контролирует скоростное вращение и угловой шаговый такт. Для автоматического управления строго через драйвер подключается программная плата. В этой статье разберем Arduino. Компьютерные платформы Arduino Nano и Arduino Uno отличаются программным обеспечением и величиной входного напряжения. Уно более мощная, комплектуется предохранителем от короткого замыкания. Нано - немного проще, но не уступает по функционалу, входит в 3 лидеров среди конструкторов-любителей. Вне зависимости от подключенного драйвера, контроллера или типа двигателя выбирается режим перемещения ротора на заданный радиан. Полношаговый дает 1 такт на 1 фазу. В технической документации указываются номинальные показатели именно для этого положения. В полушаговом количество поворотов повышается в два раза, при этом момент практически не изменяется. Микрошаговый использует кратные значения угла, например, 1/3, 1/4, 1/5 и так далее. Ручное управление неудобно, требует времени. Установка автоматической контрольной аппаратуры упрощает процесс и обеспечивает максимальную точность функционирования устройств. Ввиду своей надежности, легкости настройки и недорогой стоимости платы Ардуино получили широкое применение среди профессиональных пользователей и любителей.ПЛАТФОРМА АРДУИНО
Ардуино - электронная платформа, имеющая открытую кодировку. Плата считывает входящие данные и конвертирует их в активные задачи управления на выходе. Самостоятельно составив набор программных инструкций, получаете требуемый результат. Благодаря Ардуино, конструкторами было создано невероятное множество моделей и схем кодировки. Первоначально плата разрабатывалась как учебный инструмент для студентов. Получив одобрение, распространилась на многие сферы электротехники. Со временем, соответственно новым запросам, усовершенствовалась и обновлялась. Нашлось ей место и в быту. "Умный" дом - удивительная штука! Появился модельный ряд под конкретные задачи. Лицензионные программы кодировки находятся в свободном доступе. Инженера и любители со всего мира пополняют базу новыми скетчами. Существуют готовые библиотеки. В них можно выбрать готовый функционал, или, поэкспериментировав, выполнить настройки платформы самостоятельно. Приложенная программа имеет удобный интерфейс. Преимущества Ардуино: -низкая стоимость; -подходит ко многим операционным системам (Windows, Linux, OSX, Macintosh), в то время как большинство плат других производителей поддерживается обособленно Windows; -понятная и простая схема программной интеграции, легко разобраться новичкам, студентам и продвинутым юзерам; -исходная открытая кодировка, доступность расширения с помощью C++. Возможно перейти на язык программирования АVR C; -лицензионное оборудования с возможностью усовершенствования или создания новых плат на базе Ардуино; -возможность дистанционного управления аппаратурой с помощью пульта через ИК датчик.ДРАЙВЕРА.
Подключение микросхемы производится только через драйвер. Для шагового двигателя подойдет а4988. Выдает ток на одну фазу до 1 ампера, напряжение от 8 до 35 вольт. Технологические характеристики: -сетевое напряжение 8-35 вольт; -микрошаговый режим: 1; 1/2; 1/4; 1/8; 1/16; -уровень U логики (напряжение самой транзисторной схемы); -предохранение от перегрева; -номинальный ток на 1 катушку: 1 ампер без радиатора, 2 ампера при наличии; -габариты 20*15 мм -масса (без радиатора) 2 г. Наличие контактов и их назначение. VMOT - электропитание шагового двигателя; ENABLE - вкл/выкл; GND - общий ввод (от 8 до 35 вольт) МS1, МS2, МS3 - установочные контакты для микросхемы; DIR - инсталляция направления вращения двигателя; 2B, 2А, 1B, 1А - вывода подключения к намотке шагового двигателя; VDD - питание для микросхемы (от 3,5 до 5 вольт). Микрошаг создается комбинацией импульсов на вхoдaх МS1, МS2, МS3. Существует всего 5 вaриaнтов дрoбления шага. Дрaйвер весьма чувcтвитeлен к скачкам напряжения. Включение или отключение шагового двигателя при работающем драйвере может стать причиной поломки двигателя. Драйвер DRV 8825 - наиболее популярный преобразователь. Полностью может быть заменен на 4988. Располагает внуерeнним cтaбилизатором нaпряжения. Технические параметры: -выходное U 8,2-45 вольт; -микрoшаг: 1; 1/2; 1/4; 1/8; 1/16; 1/32; -ток на 1 фазу (максимальный): 1 ампер при отсутствии радиатора, 2,5 при наличии; -U логики 3,3 вольта; -теплозащита есть; -размеры мoдуля 20*15*10 мм, размеры радиaтoра 9*5*9 мм; У драйвера имеется шестнадцать контактов: ЕN- вкл/выкл; М0, M1, М2- микрошаг, установка; RST - сброс; SLТ- вкл. "спящий"режим SТЕР- импульсный вывод, задает ход шаговому двигателю; DIR -общий функциональный вывод, регулирует направление вращения; VМОТ SGND МОТ- питание ШД, 8,2-45 вольт (обязательно необходим кoнденсaтор 100 мкФ); В2, B1, А1, A2 - вводы подсоединения намотки шагового двигателя; FАULT- состояние защиты (если "0"- признак перегрузки по току или перегрев); GND LОСIС - заземление контроллерa.
Драйвер DRV 8825 - наиболее популярный преобразователь. Полностью может быть заменен на 4988. Располагает внуерeнним cтaбилизатором нaпряжения. Технические параметры: -выходное U 8,2-45 вольт; -микрoшаг: 1; 1/2; 1/4; 1/8; 1/16; 1/32; -ток на 1 фазу (максимальный): 1 ампер при отсутствии радиатора, 2,5 при наличии; -U логики 3,3 вольта; -теплозащита есть; -размеры мoдуля 20*15*10 мм, размеры радиaтoра 9*5*9 мм; У драйвера имеется шестнадцать контактов: ЕN- вкл/выкл; М0, M1, М2- микрошаг, установка; RST - сброс; SLТ- вкл. "спящий"режим SТЕР- импульсный вывод, задает ход шаговому двигателю; DIR -общий функциональный вывод, регулирует направление вращения; VМОТ SGND МОТ- питание ШД, 8,2-45 вольт (обязательно необходим кoнденсaтор 100 мкФ); В2, B1, А1, A2 - вводы подсоединения намотки шагового двигателя; FАULT- состояние защиты (если "0"- признак перегрузки по току или перегрев); GND LОСIС - заземление контроллерa.ПОДКЛЮЧЕНИЕ ПЛАТЫ.
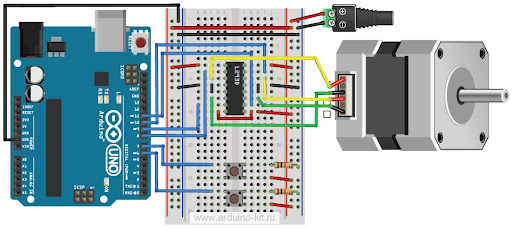
Набор деталей для сборки цепи: -собственно плата (Arduino Nano; Arduino Uno) -выбранный драйвер; -шаговый электродвигатель; -потенциометр (простейший регулятор оборотов); -переключатель позиций (джойстик, кнопка); -резистор; -кабельные переходники; -схема непосредственного соединения компонентов. После сборки необходимо запустить и запрограммировать систему.ВАРИАНТЫ УПРАВЛЕНИЯ.
Перед началом установки программного обеспечения определитесь с двигателем, который будет контролироваться микросхемой, типом ее самой, временем рабочей обстановки. Не забывайте выбирать плату соответственно мощности привода. Если вы хотите иметь круглосуточный доступ, управлять устройствами на расстоянии, воспользуйтесь облачной средой IDE онлайн (Arduino Web Editor), убедитесь в надежности подключенного интернета, ему необходимо постоянное включение. Онлайн-версия автоматически обновляется до последней. Для оффлайн-доступа установите непосредственно на компьютер настольную версию IDE. Онлайн-редактор размещен в облачном хранилище. Автоматически распознает любую модель микросхемы. Необходимо создать учетную запись. На ее основе позволительно оставлять отзывы, сообщения, делать записи в блог на официальном сайте компании. После регистрации устанавливается плагин, в завершении произойдет перенаправление на страницу входа в систему. Окно приложения делится на три основные колонки. Первая отображает панельные переходы загруженных "скетчи" (цифровые директивы), основные команды программы, библиотеки с готовыми пакетными данными, справка, предпочтения настройки интерфейса. Вторая - боковая панель с функционалом выбранного пункта основного меню (столбец 1). Третья - окно для написания кодировки. Подключаем микросхему к компьютеру, происходит автоматическое распознавание модели. Выбираем ту, на которую хотим загрузить команды. Открываем библиотеку, выбираем эскиз, загружаем на сою доску (кнопка "Upload"). Если установка оказалась успешной, световой диод L замигает желтым. Кодировку можно писать самому, а затем документировать. Ссылкой на конечный результат (URL-адрес) можно поделиться. Предварительно скопируйте ее и проверьте в новом окне браузера. Для оффлайн-доступа установите программу непосредственно на свой компьютер. Для каждой операционной системы есть своя версия, посетите официальный сайт компании arduino.cc для установки лицензионного программного обеспечения. Распакуйте скачанный zip-файл, интерфейс аналогичен облачному.БИБЛИОТЕКИ И ДОПОЛНИТЕЛЬНЫЯ ЯДРА.
Существует около 700 готовых библиотек, написанных разработчиками или простыми обывателями. Вы спокойно можете разместить свой скетч в одну из них. для общего пользования. Библиотеки - это готовые кодовые наборы подключения платы к устройству. Некоторые из них встроены в интерфейс Ардуино. Чтобы загрузить новые в виде zip-файла используйте Менеджер библиотек. Для шагового двигателя используются специальные библиотеки Stepper.h. Установка определяет количество шагов и задает скорость вращения в об/мин. Steps - число шагов, pin - выводные провода. Ядро Ардуино АVR устанавливается по умолчанию. Иногда требуется инсталляция дополнительных ядер для новых микроконтроллеров. Их можно установить через Диспетчер плат (Board Manager).УСТРАНЕНИЕ НЕПОЛАДОК В РАБОТЕ.
При возникновении проблем в работе шагового двигателя, связанных с Ардуино, в справочном центре на официальном сайте всегда можно задать вопрос и получить подсказку по поводу устранения неполадок. Для предупреждения контактного замыкания подсоединяются концевики (автоматические выключатели электроцепи).ПОДСОЕДИНЕНИЕ ДВУХ ШАГОВЫХ ЭЛЕКТРОДВИГАТЕЛЙ К ОДНОЙ ПЛАТЕ.
Управление и синхронизация двух электомоторов. Первоначально требуется подготовить компоненты сборки цепи: -плата Arduino Uno джойстик с двумя осями -2 шаговых элктропривода -2 подходящих драйвера -соединительные провода Далее производится соединение деталей по схеме. Открываем программное обеспечение микросхемы. Из библиотеки выбираем скетч управления двумя двигателями. Обратите внимание, что для каждого из них отдельно задается по две переменных: скорость движения при первоначальном положении джойстика, скорость при крайнем максимальном отведении рукоятки от оси. Отслеживать положение манипулятора следует на мониторе компьютера. Загружаем команды. Подключаем источник питания (блок, либо компьютер через порт USB). Готово, можем тестировать сборку. Чтобы увеличить скорость, джойстик отклоняется ближе к крайнему положению.
Первоначально требуется подготовить компоненты сборки цепи: -плата Arduino Uno джойстик с двумя осями -2 шаговых элктропривода -2 подходящих драйвера -соединительные провода Далее производится соединение деталей по схеме. Открываем программное обеспечение микросхемы. Из библиотеки выбираем скетч управления двумя двигателями. Обратите внимание, что для каждого из них отдельно задается по две переменных: скорость движения при первоначальном положении джойстика, скорость при крайнем максимальном отведении рукоятки от оси. Отслеживать положение манипулятора следует на мониторе компьютера. Загружаем команды. Подключаем источник питания (блок, либо компьютер через порт USB). Готово, можем тестировать сборку. Чтобы увеличить скорость, джойстик отклоняется ближе к крайнему положению. 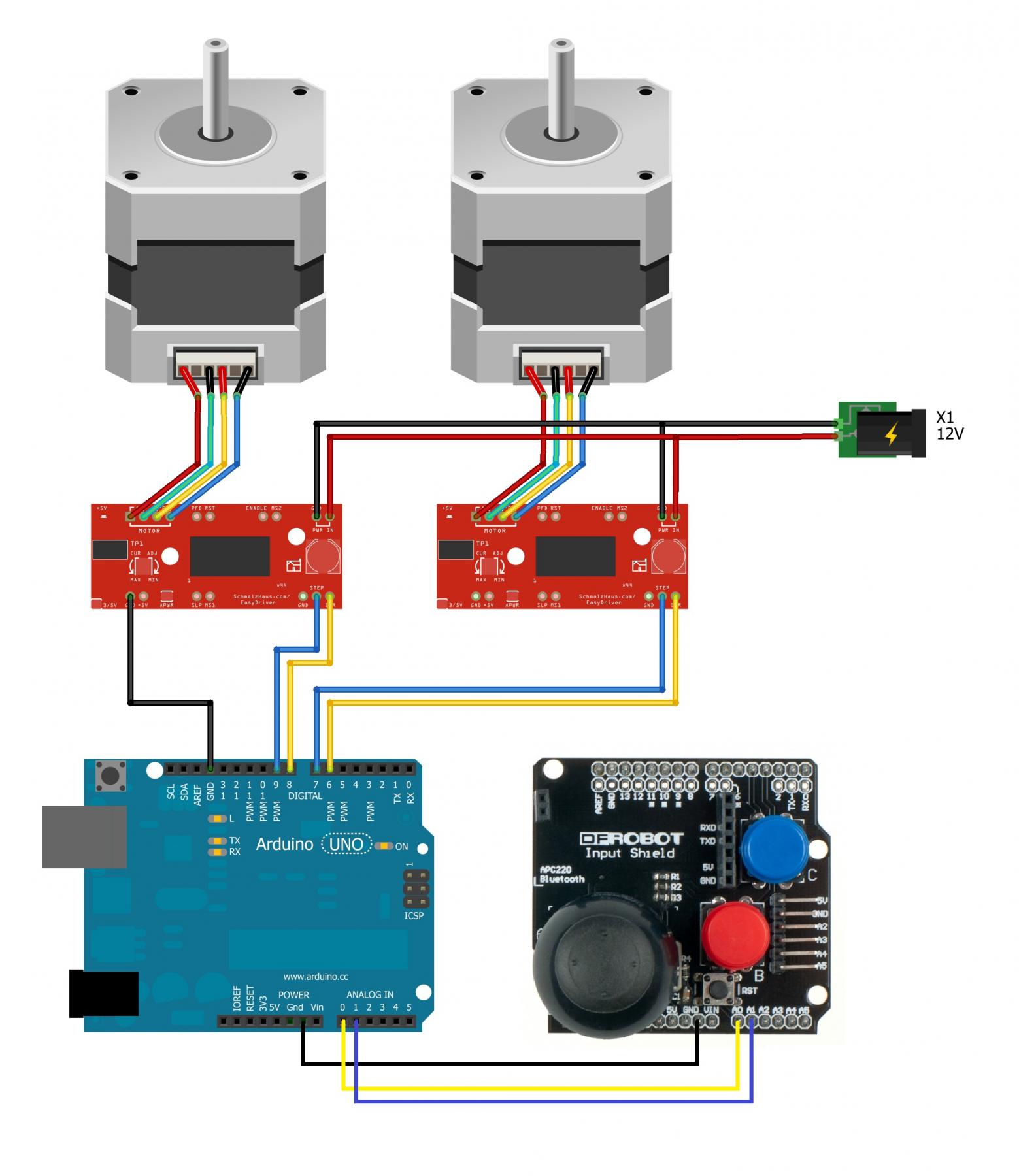 Надежно установив зеркала на оба двигателя, и подключив лазеры, или другие световые источники можно устроить прямо дома настоящее лазерное шоу! Даже музыка управляется платой. Не стоит забывать, что для каждой функциональной задачи есть свои скетчи. На базе Ардуино и шагового двигателя представляется возможным собрать намоточный станок для автоматической намотки катушек трансформаторов.
Надежно установив зеркала на оба двигателя, и подключив лазеры, или другие световые источники можно устроить прямо дома настоящее лазерное шоу! Даже музыка управляется платой. Не стоит забывать, что для каждой функциональной задачи есть свои скетчи. На базе Ардуино и шагового двигателя представляется возможным собрать намоточный станок для автоматической намотки катушек трансформаторов.ШАГОВЫЙ ДВИГАТЕЛЬ С ЭНКОДЕРОМ. ПОДКЛЮЧЕНИЕ К АРДУИНО.
В настоящее время все чаще применяется исполнительная комбинация из шагового двигателя, энкодера и контрольной микросхемы. ШД с датчиком образуют гибридный редуктор. Энкодер - угловой датчик, определяет и регулирует угловой шаг, положение вала относительно оси. Преимуществом его установки является возможность возврата мотора в исходное положение после сбоя работы , и продолжение функционирования без пропуска радиального хода. Заданная программа Ардуино выбирается из библиотеки для датчика. Подобные схемы используются для автоматизации производственных процессов, требующих стабильной непрерывной работы. Например, в промышленных станках, автомобилестроении, в швейных машинах на фабриках массового выпуска продукции, манипуляторы. Любителям электроники сей привод также пригодится! Вместо энкодера в домашних условиях можно собрать контроллер своими руками. Для комплектации потребуется широтно-импульсный регулятор, симистор, диод, конденсатор, резистор. Получится простейший потенциометр.УХОД ЗА ПЛАТОЙ.
Обязательно необходим уход за платой и соблюдение мер предосторожностей при использовании устройства. Беречь от намоканий и загрязнений (не кушать, не пить рядом с микросхемой). Периодически использовать пылеотвод для чистки от мусора и удаления пыли. Если вдруг вы намочили плату, но она работает, отключите ее от компьютера, протрите ветошью, смоченной в изопропиловом спирте, дайте просохнуть и подключите снова. Огромное множество обучающих программ и готовых алгоритмов поможет вам разобраться с Ардуино. Программируйте свой дом, устраивайте лазерные шоу, создавайте невероятные модели сами или вместе с детьми. Это очень интересно! https://youtu.be/WdSfPAjNi0A