
Особенности конструкции
Электродвигатель, работающей от сети с неизменной токовой величиной (ДПТ), как и асинхронный или синхронный двигатель с изменяемым напряжением электропитания, содержит два основных блока: неподвижный статор (или индуктор) и вращающийся якорь (или ротор). Статор обеспечивает формирование основного магнитного поля. Его структурная схема содержит:- станину, выполненную из литой стали;
- главные полюсы, осуществляющие формирование основного магнитного поля;
- дополнительных полюсов, обеспечивающие хорошую коммутацию.
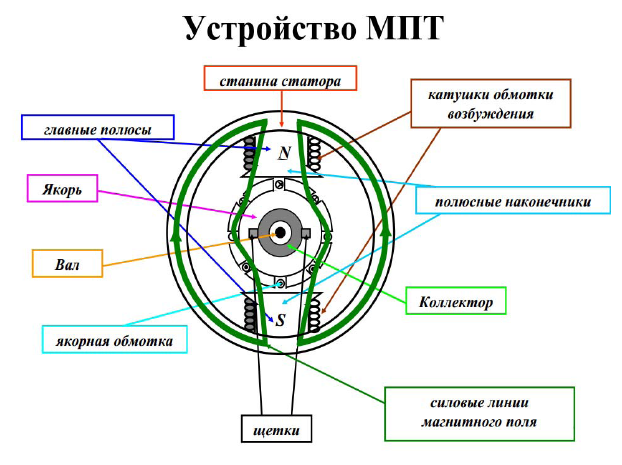 Стальная станина служит надежным основанием электромотора, на котором крепятся все неподвижные элементы. Она также выступает структурным звеном магнитопровода. Главный полюс состоит из шихтованного сердечника, закрепленного на основании болтовым соединением, и катушек цепи. Его изготовляют в массиве или набирают из электротехнической стали. Для формирования требуемого распределения магнитных силовых линий сердечник оснащается полюсным наконечником. В отдельных местах производят двигатель постоянного тока с распределенными компенсационными электропроводами, размещаемыми в пазах сердечников. Электроцепи главного полюса конструктивно выполняются в виде сосредоточенных катушек и могут питаться либо от сетевого источника, либо от зажимов якорной обмотки. Двигатели постоянного тока с центальным подключением к электропитанию и являются ДПТ независимого возбуждения. Добавочные полюсы аналогично главным содержат индукционные сосредоточенные катушки и сердечник, выполненный в виде массивного цельного изделия. Устройство подвижной части электропривода – якоря – предусматривает применение:
Стальная станина служит надежным основанием электромотора, на котором крепятся все неподвижные элементы. Она также выступает структурным звеном магнитопровода. Главный полюс состоит из шихтованного сердечника, закрепленного на основании болтовым соединением, и катушек цепи. Его изготовляют в массиве или набирают из электротехнической стали. Для формирования требуемого распределения магнитных силовых линий сердечник оснащается полюсным наконечником. В отдельных местах производят двигатель постоянного тока с распределенными компенсационными электропроводами, размещаемыми в пазах сердечников. Электроцепи главного полюса конструктивно выполняются в виде сосредоточенных катушек и могут питаться либо от сетевого источника, либо от зажимов якорной обмотки. Двигатели постоянного тока с центальным подключением к электропитанию и являются ДПТ независимого возбуждения. Добавочные полюсы аналогично главным содержат индукционные сосредоточенные катушки и сердечник, выполненный в виде массивного цельного изделия. Устройство подвижной части электропривода – якоря – предусматривает применение:- зубчатого сердечника, выполненного из листовой электротехнической стали;
- коллектора, собранного из изолированных друг от друга клинообразных медных пластин.
Физические процессы
Действие эл/привода постоянного тока с независимым возбуждением основано на свойствах находящихся под напряжением проводников в магнитном поле. Наглядно это демонстрирует металлическая рамка, подключенная к питающей сети и размещенная в магнитном пространстве. Находясь под напряжением, она начинает вращаться. Это связано с появлением момента при взаимодействии электротока и магнитного поля. На базе этого явления был построен коллекторный двигатель. Структурная схема ротора предусматривает использование аналогичных токопроводящих рамок, которые формируют роторную эл/обмотку.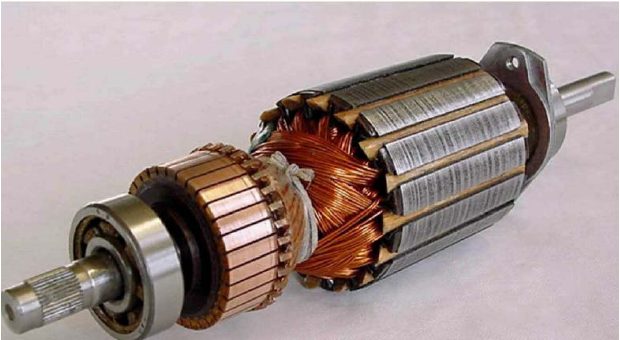 Источником магнитных силовых линий служит индуктор с намотанными на его полюсах проводником.
Источником магнитных силовых линий служит индуктор с намотанными на его полюсах проводником. 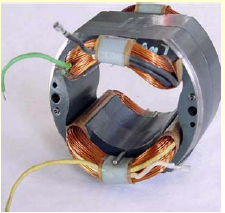 Исследование двигателя постоянного тока показало зависимость мощностных и электро-показателей электромотора от метода подсоединения обмоток индукторного устройства. Руководствуясь определенной схемой включения цепи индуктора, различают последовательное, параллельное, смешанное и независимое возбуждение тяговых двигателей. Приведенные варианты структурной организации индукторного устройства реализовываются в разных типах моторов. Так, схема включения двигателя постоянного тока независимого возбуждения является основой шунтового агрегата, последовательный метод нашел применение в сериесном электромоторе, а смешанный – в компаундном ДПТ.
Исследование двигателя постоянного тока показало зависимость мощностных и электро-показателей электромотора от метода подсоединения обмоток индукторного устройства. Руководствуясь определенной схемой включения цепи индуктора, различают последовательное, параллельное, смешанное и независимое возбуждение тяговых двигателей. Приведенные варианты структурной организации индукторного устройства реализовываются в разных типах моторов. Так, схема включения двигателя постоянного тока независимого возбуждения является основой шунтового агрегата, последовательный метод нашел применение в сериесном электромоторе, а смешанный – в компаундном ДПТ.Рабочие режимы
Преобразование электроэнергии в механическую энергию производится в соответствии с процессами работы двигателя постоянного тока. Они определяются на основе взаимодействия электротока проводников роторного проводника с полем, созданным результирующей магнитодвижущей силой (МДС) всех эл/обмоток привода. Результатом такого взаимодействия является возникновение электромагнитных воздействий на якорные эл/проводники. Под воздействием этих сил возникает электромагнитный момент, обеспечивающий круговое движение вала. Электродвигатель постоянного тока в любой период времени работает в соответствии с характеристиками и знаком моментных показателей, действующих на вращающийся узел со стороны связанного с ним механизма. В связи с этим выделяют следующие основные режимы работы двигателя:- двигательный;
- тормозной;
- генераторный.
Этап пуска
Пуск двигателя постоянного тока – это один из самых ответственных этапов функционирования электродвигателя, во время которого повышается риск выхода из строя щеточно-коллекторного узла и даже его возгорания. Запуск всегда начинается с режима короткого замыкания, который характеризуется опасным уровнем начальной токовой нагрузки. Это объясняется наличием электросопротивления только в якорной электроцепи машины. При подключении оборудования к питающей сети электродвижущая сила в роторе не формируется, поскольку он неподвижен. На старте коллекторный двигатель воспринимает чрезмерные моментные воздействия, инициирующие удары на механические элементы привода. В отдельных случаях имеет место их физическое разрушение. Действие высокого момента на старте продолжается до тех пор, пока роторный вал не наберет нужные обороты. Чтобы двигатель с независимым возбуждением не воспринимал усилия, превышающие допустимый уровень, важно правильно рассчитать электросопротивление. Какими бы ни были способы пуска двигателя постоянного тока, запуск электромашины должен выполняться с соблюдением двух условий:- величина моментной нагрузки не должна превышать момент статического усилия;
- максимальные токовые и моментные показатели должны быть меньше допустимых пределов.
 Для многоступенчатого пуска определяют максимальное или минимальное значение пускового момента: Мп мин = (1,2–1,5) Мс, при этом Мп макс ≤ Мдоп. Каждая ступень имеет собственный показатель. Во время подключения происходит скачок моментной величины до максимума и двигатель с независимым возбуждением начинает разгон. После достижения минимального порога он переключается и часть электросопротивления выводится из роторной эл/цепи. Затем усилие снова увеличивают до Мп макс и цикл повторяется пока мотор не достигнет уровня рабочей скорости.
Для многоступенчатого пуска определяют максимальное или минимальное значение пускового момента: Мп мин = (1,2–1,5) Мс, при этом Мп макс ≤ Мдоп. Каждая ступень имеет собственный показатель. Во время подключения происходит скачок моментной величины до максимума и двигатель с независимым возбуждением начинает разгон. После достижения минимального порога он переключается и часть электросопротивления выводится из роторной эл/цепи. Затем усилие снова увеличивают до Мп макс и цикл повторяется пока мотор не достигнет уровня рабочей скорости.Способы торможения
Торможение двигателя постоянного тока реализуется разными методами:- рекуперативным;
- противовключением;
- динамическим.
Механические характеристики
Для определения свойств электромашины для электропривода ориентируются на его технические данные. Наиболее информационным параметром является механическая характеристика двигателя (МХД), показывающая зависимость частоты вращения электромашины от развиваемой ею момента, что соответствует записи n = f(M). При необходимости связывания работы мотора с сетевым питанием полезными будут электромеханические показатели. Они выражают зависимость между оборотами и уровнем электротока в цепях электродвигателя. Функция в этом случае выглядит следующим образом: n =f(I). Исследование двигателя постоянного тока позволило выявить закономерность между физическими величинами и получить следующее уравнение МХД:n = nₒ – Δn,
где: nₒ=U/(Ce*Ф) показатель частоты вращения выходного вала ДПТ при идеальном холостом ходе; ∆n= (M*Rx)/(Ce*Cm*Ф² ) изменение параметра частоты вращения вала при приложении механической нагрузки. Из формулы МХД видно, что регулирование скорости двигателя постоянного тока независимого возбуждения при неизменном значении моментной нагрузки можно осуществлять одним из следующих методов:- изменяя показатель напряжения на роторе;
- регулируя уровень электросопротивления в якорной цепи;
- воздействуя на возбуждающий процесс в моторе.
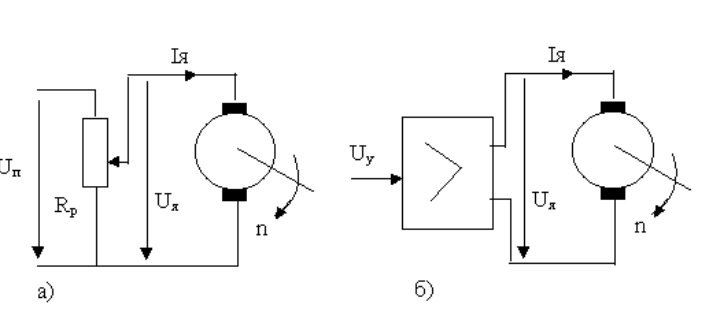 Это выражается графической зависимостью:
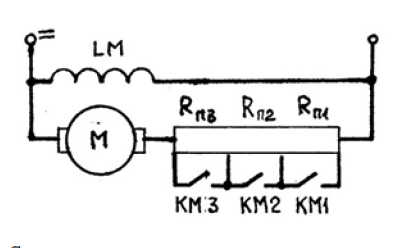
Это выражается графической зависимостью: 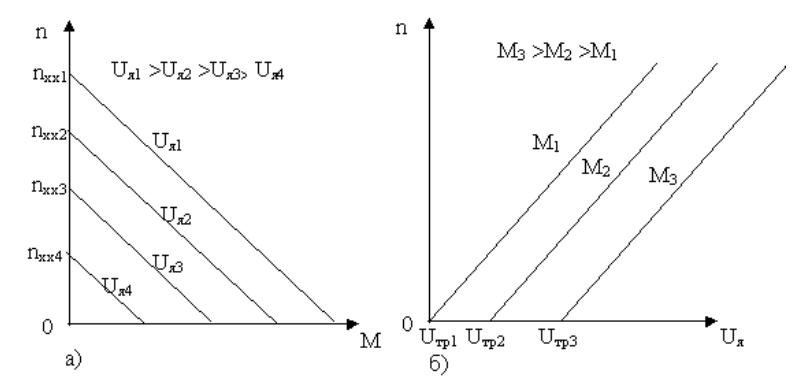 Регулирование сопротивления в роторе выполняют изменением параметра добавочного электросопротивления, включённого последовательно в якорную цепь, как показано на рисунке:
Регулирование сопротивления в роторе выполняют изменением параметра добавочного электросопротивления, включённого последовательно в якорную цепь, как показано на рисунке: 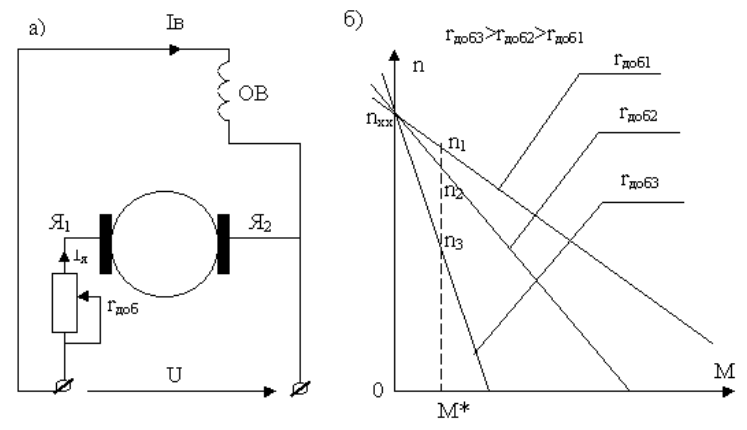 Третий метод изменения оборотов путем воздействия на возбуждающий электропоток осуществляется включением в электроцепь добавочного реостата. При этом напряжение остается константой. Двигатель постоянного тока с подобным типом регулирования имеет следующую электросхему включения и зависимость:
Третий метод изменения оборотов путем воздействия на возбуждающий электропоток осуществляется включением в электроцепь добавочного реостата. При этом напряжение остается константой. Двигатель постоянного тока с подобным типом регулирования имеет следующую электросхему включения и зависимость: 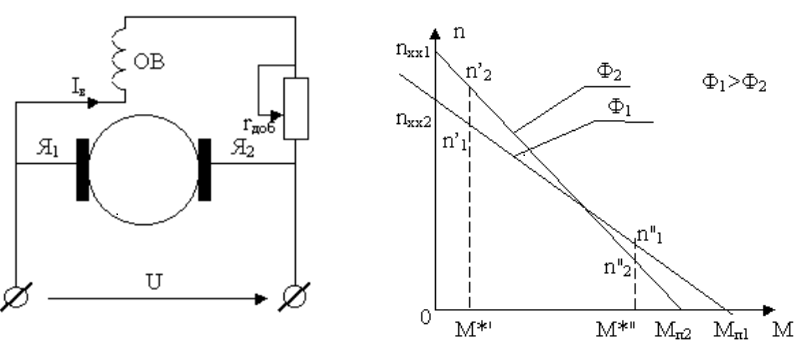 График представляет собой прямую линию, угол наклона которой к оси абсцисс зависит от показателя возбуждающего потока и электросопротивления ротора. При уменьшении электропотока и увеличении сопротивления МХД становится круче.
График представляет собой прямую линию, угол наклона которой к оси абсцисс зависит от показателя возбуждающего потока и электросопротивления ротора. При уменьшении электропотока и увеличении сопротивления МХД становится круче. 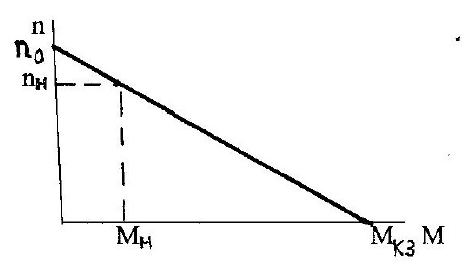 Двигатели постоянного тока с установившимся рабочим режимом обладают статическими данными. То есть величина их скорости одинакова при равенстве моментов машины и приводимого узла. Когда имеют место переходные режимы, характеристики называют динамическими. Машины постоянного тока с номинальным возбуждающим потоком и отсутствием дополнительных электросопротивлений в электроцепях обмоток обладают естественными МХД. Двигатель постоянного тока с параметрами, отличающимися от номинальных, или ДПТ с добавочным сопротивлением имеют искусственные характеристики. Качественная оценка МХД производится показателем жесткости, который делится на три категории:
Двигатели постоянного тока с установившимся рабочим режимом обладают статическими данными. То есть величина их скорости одинакова при равенстве моментов машины и приводимого узла. Когда имеют место переходные режимы, характеристики называют динамическими. Машины постоянного тока с номинальным возбуждающим потоком и отсутствием дополнительных электросопротивлений в электроцепях обмоток обладают естественными МХД. Двигатель постоянного тока с параметрами, отличающимися от номинальных, или ДПТ с добавочным сопротивлением имеют искусственные характеристики. Качественная оценка МХД производится показателем жесткости, который делится на три категории:- идеально жесткие;
- жесткие;
- мягкие.
