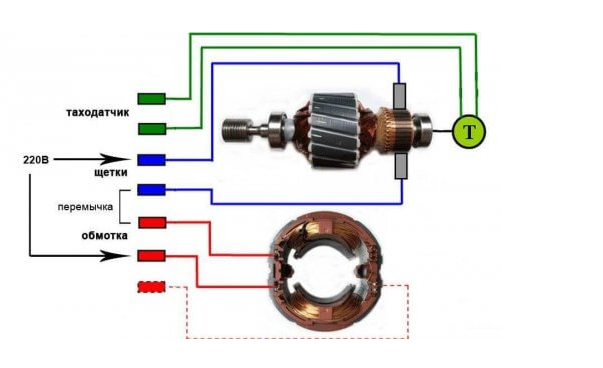
Схема управления двигателем постоянного тока, реверсирование и реверсивное управление мотором Реверсирование и замедление двигателей постоянного тока электронный механизм arduino и электронная схема управления. Основная схема пластического запуска и остановки без содействия переключателей в обе стороны. Главной опорой данной схемы стоит простой резистор, который удерживает вращение прибора в среднем состоянии, а при крайних плавно начинает вращать электродвигатель в обоих направлениях. Такое применение подходит для 12в электромотора, его питания и схемы в целом, также управления при неизменном потоке, которое подробно описано далее. Включение неизменчивого тока прямым запуском, возможно только с механизмами малой мощности (допустимый пик тока 4-6 кратно номинального). Пуск постоянного течения в носителях с более сильным мотором совершается с использованием пускового реостата, он же и регулирует допустимые значения для поддержки механической прочности, как это было описано в схеме. Нормальный ток необходим при запуске движок, должен развивать довольно большой разгон. Для этого акселерометр последовательно уменьшает сопротивление при перемене рычага с одного неподвижного контакта на другой. Снижение сопротивления также возможно замыкания ненадолго секций, с помощью контакторов. В противовес пускового, регулировочный реостат рассчитан на долговременное прохождение тока. Но, происходит большая потеря энергии во время работы инструмента, результатом чего кпд в моторе убавляется. При ручном запуске или автомате, ток меняется от максимально допустимого, 1,8-2,5 – кратному номинальному в начале, и при противодействии аппаратуры до минимального, 1,1 – 1,5 кратному номинальному в конце. Также такие значения будут при переключении на другое положение пускового реостата.
Реверсирование Реверсирование – смена вращений двигателя, в котором нужно переключиться на обмотку или якорь, но для верпа сила будет течь в другом направлении. Так званые регуляторы, которые используются для моторчиков с неизменным течением. Реверс используется переменой фаз в сети переменного тока. Возможно в автоматическом действии с заменой сигнала, и также после определения нужного действия на логический вход. В обоих случаях направление искры в якоре будет противоположным.
Основные тактики для возврата механизма:- Контакторный, используется очень редко.
- Статический способ. В основном это изменение полярности или направления тока.
- Реверсирование с магнитным пускателем.
- Реверс электродвижка с асинхронными прямыми частотными преобразователями. Используется вместе с векторным управлением в замкнутой системе и датчиком обратной связи. Аналогично и регулирование аккумулятора с непрерывным током.
Реверс с постоянными магнитами производится с помощью изменения полярности питания пусковых устройств, тогда ротор начинает вращаться в другую сторону. В этом случае можно регулировать скорость вращения. В основном управление происходит по 2-х проводной линии (тиристорами). Также изменения реверсивности на большой мощности следует на якоре. Неправильное возбуждение обмотки производит к неисправностям, из-за повышенного напряжения возможна изоляция обмоток и выход аппарата из строя. Поэтому нужно правильно собрать оборудования по технической характеристике. Осуществляется реверс моторов последовательного возбуждения возможно с помощью переходов или обвиванием возбуждения якоря, потому что энергические запасы в якорях и обвивках не очень большие и время непрерывного переключения небольшие. Возвращение с параллельным возбуждением в якоре сначала нужно отключить от питания, поэтому моторчик автоматически тормозится. Когда он заканчивает тормозить, якорь переключается, если он не переключился во время торможения, тогда запуск начинается при вращении в обратную сторону. В той же градации придерживается и реверсирование для последовательного возбуждения:
- Выключение
- Замедление
- Переключение
- Пуск в обратную сторону
Реверс основного инструмента с разнообразным включением нужно перевести на якорек или прямую обмотку разом с параллельной обмоткой.
Пуск и торможение Торможение с постоянным током связано с, конечно же, мощностью. Поскольку прямое подключение возможно на малых мощностях сердца аппарата, во всех следующих обстоятельствах можно использовать только пусковой реостат. Он определяет позволенные значения и определяет допустимый ток. Реостат представляет собою провод, рассортирован на секции с большим сопротивлением. В переходах зафиксированы медные кнопочки или контакты, к ним можно присоединять провод. При запуске сопротивление оборудования должно уменьшаться по порядку. Чтобы уменьшить время работы мотора, нужно замедление, так как при его отсутствии может быть слишком большое количество. Также замедление нужно для фиксирования приводимых приборов в нужном порядке положения.
Выключение возможно на двух типов: электрическое и механическое Механистическая остановка в основном делается с помощью накладки колодок на тормозной шкив. Нехватка самопроизвольного тормоза: Момент остановки невозможно предугадать из-за случайностей. Если масло, или жидкость попадет на шкив тормоза данное замедление возможно, когда период времени и тормозного пути не ограничены.
В аварийных ситуациях после прежнего электрического торможения на небольшом темпе движения можно сделать полную остановку инструмента. Зафиксировать положение прибора в определенном месте. Электрическая остановка создает точный момент торможения. Так как фиксация невозможна в нужном месте, механическим путем оно дополняется и входит в работу после окончания работы электрического. Такой тормоз возможен, когда ток идет в траектории согласно ЭДС движка. Доступные три вида торможения:
- Стоп мотора беспрестанного потока с возвращением энергии. Кинетическая энергия должна превратиться в электрическую, часть с которой попадает обратно в сеть. Стоп выполнено, когда напряжение уменьшается при любом загруженности машинного оборудования.
- При противоположном включении. С помощью вращающегося аппарата переключается на противоположное направление вращения. В нем напряжение складывается, следовательно, нужно включить резистор для ограничения силы с сопротивлением. Такое замедление берет большую затрату энергии.
- Динамическое. Делается при включении на зажимах в сердце резистора мотора. Кинетическая запасная энергия превращается в электрическую энергию и рассеивается. Такое замедление очень распространенный.
Пуск, возврат и замедление двигателей постоянного тока выполняется с соблюдением технологических требований и правилам безопасности.
Arduino возврат электромотора для 12 вольтовых инструментов При собирании моделей часто используются малые щеточные электромоторы с постоянным током. Для их управления используется микроконтроллер arduino, который запрограммирован к ручному управлению. Поэтому, если вращения в нем предполагается в одну сторону с небольшой мощностью в двигателе, а также напряжения от 3,3 до 5ти Вт, то схему можно упростить.
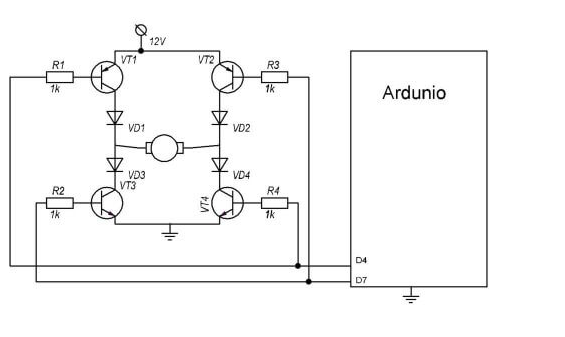
В такой модели дистанционного управления нужно использовать возвращение моторов с мощностью более 5 Вт. В данном микроконтроллере используют ключи, сделанные по мостовой схеме. Ниже на картинке можно увидеть универсальную схему подключения двигателя с реверсом на ардуино. Таким способом могут использоваться полевые транзисторы или драйвер (специально изготовление устройство), оно помогает подключить мощные моторчики. Собирать данную схему должен обученный специалист, при самостоятельном установлении нужно соблюдать меры безопасности.
Заключение: Реверсирование и выключение приборов постоянного тока является очень гибким приводным приборам, которое используется там, где не нужны большие моменты при старте. Механизм имеет надежные цепи регулировки скорости вращения и простой при запуске в ход орудия. https://www.youtube.com/watch?v=H8DmECqSW2Q
