Устройство униполярного двигателя, его принцип работы и правила подключения к биполярным драйверам
На чтение 10 минОпубликованоОбновлено
Шаговые двигатели являются бесщеточными механизмами, у которых несколько обмоток и последовательная подача тока на каждую обмотку. Первые модели были изобретены еще в начале позапрошлого века. За два столетия эти устройства претерпели больших изменений. Нужно рассмотреть эти агрегаты, разобраться в их особенностях и видах. У них есть как минусы, так и плюсы. А в управлении и подключении много тонкостей - все зависит от разновидностей моделей. Униполярные электродвигатели являются разновидностью электрических машин постоянного тока. Они содержат проводящие диски с постоянным магнитным полем, параллельным оси вращения диска и два токосъемника.
Подключение униполярных шаговых моторов
У некоторых их моделей имеется 6 проводов для подключения к платам. Но для этого необходимо иногда выполнить переделку шагового двигателя из униполярного в биполярный. Сначала нужно слегка изучить теорию. У биполярных двигателей одна обмотка в каждой из фаз, которая, чтобы изменить магнитное поле, его направление, должна быть переполюсована драйвером. Для этих типов движков понадобится биполярный агрегат с двумя обмотками и четырьмя выводами. Униполярные движки имеют по одной обмотке на каждой фазе, но от середины сделаны отводы. Это и позволить менять направление магнитных полей, создаваемых обмотками. Схема драйверов при этом значительным образом упрощается. Всего существует 2 варианта переделки униполярных моделей в биполярные:
Подключать конструкцию к драйверу нужно, не применяя центральный вывод в обмотке - белые с желтыми. Таким образом будет получен высокий момент.
Подключать движок к драйверу без применения крайних выводов в обмотках - синих и черных. Получается более высокая приемистость.
Логические сигналы, чтобы управлять шаговым движком, формируются микроконтроллерами. Ресурсов последних вполне достаточно для этого даже при микрошаговом сложном режиме. Чтобы подключать шаговые движки посредством слаботочных логических сигналов нужно воспользоваться усилителями сигналов - драйверами.У драйверов есть несколько функций:
включать;
выключать;
менять полярность;
коммутировать обмотки;
обеспечивать необходимый ток и напряжкние на фазной обмотке движка;
защитить коммутирующие элементы от напряжения обмотки самоиндукции.
У некоторых драйверов гораздо больше возможностей. Например, уменьшать силу тока, чтобы зафиксировать положение остановленного движка или обеспечивать быстрое нарастание тока, когда происходит включение.
Что из себя представляет шаговый мотор
Шаговые двигатели - это электромоторы, в которых импульсная запитка током приведет к перемещению роторных частей на заданные углы. Их можно причислить к классу бесколлекторных электродвигателей с постоянным током. Когда произойдет запуск, то это самый больший момент, хотя скорость минимальная, а сам агрегат покажет прекрасные характеристики, даже если находится в покое. [caption id="attachment_4541" align="aligncenter" width="1280"] Униполярный гибридный шаговый мотор в работе[/caption] Управляют им через дискретные импульсы, которые формируются на драйверах моторов. Первые шаговые движки выглядели как электромагниты, которые вращаются при включении храпового колеса. После каждого включения будет перемещение на 1 позицию. На протяжении эксплуатации двигатели будут оптимизироваться как конструктивные и функциональные устройства.В какой сфере применяют двигатели:
устройств памяти ПК;
считыватели ленты и перфораторы;
оборудование для считывания оптических дисков;
периферийные устройства машин для вычисления;
станки с программным числовым управлением.
Широкое использование ШД получили давно. Они активно используются в машиностроении, особенно 2-х фазные электродвижки гибридного вида. Еще их используют в приводах различных механизмов и машин, работающих в особом режиме.
По какому принципу работают униполярные моторы
Все зависит от разновидности оборудования и его конструктивных особенностей. Они могут быть разными, но принцип у них один и он неизменен. Когда на первой обмотке будет электричество, то роторы переместятся на указанные выше углы. Когда оно поступит на 2-ю, 3-ю и 4-ю обмотку, то вал будет вращаться дальше, пока не пройдет полный круг. И так по новой. Если нужно изменить очередность вращения, то придется подать обратный импульс. Чтобы пользователям было удобно управлять ШД, а также менять их характеристику, необходимо учитывать особенности его применения.Плюсы ШД:
долгий срок службы;
точность;
стабильная работа;
более недорогая альтернатива;
прекрасные характеристики;
простой ремонт.
Среди недостатков отмечают чрезмерные вибрации, низкий момент, малую эффективность, тяжелый набор скорости. Не стоит забывать о риске нарушения позиционирования - если изменить этот параметр, то нагрузка может подняться выше. Иногда ротор может проскальзывать. О подобной проблеме знают все и она может проявиться в том случае, если превысится допустимое значение.
Что касается конструктивных особенностей
На сегодняшний день используют некоторые шаговые двигатели, но другой конструкции и с другим типом обмоток. Особенности управления и параметры у них тоже другие. Нужно тщательным образом рассмотреть каждую из классификаций.С позиции конструкции ротора выделяют 3 вида устройств: реактивный, движок с магнитами и смешанный.Гибридные устройства совмещают в себе самые главные качества реактивного и магнитного агрегата. Современные модели отличаются от прошлых углом и шагом. Конструктивным образом роторы оборудуют постоянными магнитами, которые имеют цилиндрическую форму. А снаружи они выглядят как полюса, имеющие круглое сечение. На их поверхности имеются роторные зубья. Благодаря такой особенности обеспечивается прекрасный вращательный момент. Главный плюс - максимальный размер плавного хода и скорость, а также точность.Движки с магнитом имеют главное отличие - подвижные элементы комплектуются постоянными магнитами, у которых два и более полюсов. Роторы вращаются из-за подтягивания и отталкивания полюсов при помощи электрических полей при подаче их в момент подачи разницы потенциалов на обмотки.Синхронные или реактивные не имеют роторных магнитов. Они изготовлены из специального сплава, который позволяет понизить индуктивную потерю. У устройства вид шестеренки, а на полюс статора обычно подают ток со второй пары. В результате создаются магнитные силы, чтобы перемещать ротор. Реактивный шаговый аппарат действует по принципу синхронного мотора, а поля статоров и роторов вращаются в одну сторону.
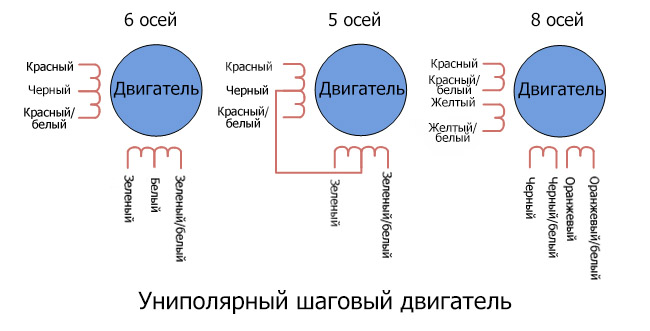
Как отличаются шаговые двигатели по типу обмоток
То, насколько плавным будет функционирование ШД, зависит напрямую от количества обмоток, так что на это следует обратить больше всего внимания. От фаз не зависит количество фаз. Униполярные шаговые двигатели имеют одну особенность - они имеют отпайку, поэтому легко ли меняют полюса? Запросто! Отрицательная черта - использования части витков, так что снизится вращательный момент. Чтобы повысить мощность, средний вывод нельзя подключать. Конструктивным образом у униполярных устройств 5 и 6 выводов. [caption id="attachment_4543" align="aligncenter" width="957"] Принцип работы постоянного Шагового двигателя[/caption] К группе биполярных моторов можно отнести ШД, которые подключают к контроллерам посредством четырех отпаек. Обмотка может быть параллельной и последовательной. Чтобы изменить направление тока, используют чипы, которые обеспечивают ручной образ управления. Достичь этого эффекта можно при помощи мостов. Биполярные агрегаты имеют меньшие размеры.
Что зависит от типа управления
Чтобы расширить функционал и сделать применение удобным, используют следующие системы управления: волновую, пошаговую и полушаговую. При выборе ШД следует понимать, что они бывают разными, как и их особенности.
Биполярные агрегаты работают с высокой точностью шагов.
Гибридные сервомоторы с энкодером - их особенность в инкрементальном энкодере (в них объединены электромоторы, а стоят они меньше, по сравнению с сервосистемами и используются с контроллерами).
На рынке имеется столько устройств, которые имеют уникальные характеристики и подходят для некоторых сфер. Все это нужно обязательно учесть при выборе моделей.
Главные характеристики и параметры
Когда приступают к выбору шагового ШД, то обязательно обращают внимание на его параметры. Например, на количество полных шагов и угол дискретного перемещения. Сопротивление обмотки также важно - оно будет влиять на напряжение, выдаваемое агрегатом. Отдельно уделяют внимание пробивному напряжению - безопасное использование определяется целостным изоляционным слоем. Между кожухом и каждой обмоткой измеряется сопротивление изоляции.Момент бывает нескольких видов:
инерционным;
стопорным;
крутящим;
удерживающим.
Только после комплексного анализа характеристик получится точно подобрать устройство для решения конкретной задачи. ШД относятся к синхронным бесщеточным агрегатов, имеющим по несколько обмоток на статорах, а роторы выполняют либо из магнито-мягких, либо из магнито-твердых материалов, иногда они сочетаются.
Как определить вид двигателя
Для начала нужно сосчитать число выводов. Если их четыре, то речь идет о биполярном шаговом моторе и переделывать ничего не придется. Если пять выводов, то это униполярный ШД и в нем один из выводов соединяется с остальными. Можно запросто переделать такой мотор в биполярный путем переключения катушки. Но движок придется разобрать.С шестью выводами похожи на пятивыводные. Но есть одно исключение - центральные выводы не соединяются между собой. Когда восемь выводов, то это 4 независимые катушки. Так что становится понятно, что применять КПД униполярного шагового мотора с биполярными драйверами очень даже реально. Также от типа шагового двигателя и способа его подсоединения, ревеса можно менять параметры, чтобы использовать в своих целях.
Простой униполярный двигатель своими руками
Первая модель была продемонстрирована Майклом Фарадеем ровно 200 лет назад, который проводили эксперименты с магнетизмом и электричеством. Именно он смог открыть самую известную в мире круговую силу, на основе которой и может работать униполярный движок, поэтому конструкция и получила название: униполярный двигатель фарадея. Изготовить его предельно просто из обычных батареек АА. Достаточно будет взять пальчиковую батарейку для того, чтобы изготовить агрегат собственноручно. Также не обойтись без медной проволоки и неодимовых магнитов.Сперва делается впадина на положительном полюсе гвоздем, отверткой или чем-то еще. Но бить по ней чересчур не стоит - нужна не дырка, а вмятина. Крышка должна остаться целой. После этого батарейка помещается на стопочку из магнитиков (не забываем оставлять место для контакта с проводом).Теперь делаем катушку из проволоки с острым концом: формируем спираль, помещаем острый конец в углубление, растягиваем пружину под размер батарейки - катушка должна висеть свободно и концом провода доставать до магнитиков. После этого провод должен начать вращение либо по, либо против часовой стрелки.
Переделываем шаговый двигатель из униполярного в биполярный
Ежегодно аддитивные технологии начинают сильно развиваться, становятся общедоступными, поэтому многие решают лично интересоваться всем, что попадет в руки. Переделка шаговых двигателей из униполярных в биполярные - весьма увлекательное мероприятие.Чтобы разобрать ШД, следует открутить четыре болтика и снять заднюю крышку. Затем отрезать левую дорожку. Отпаять проводки, пронумеровать выводы. Все зависит от количества необходимых обмоток и соединения. Если правильно все подключить, то будет достигнута максимальная скорость вращения. Схема соединения выбирается в зависимости от конкретно взятой цели и удобства соединения.
Униполярный шаговый двигатель в системе Ардуино
ШД являются уникальными электромеханическими устройствами, объединяющими в себе мотор и позиционирующее устройство без каких-либо обратных связей. Их использование в значительной мере упростит работу механической конструкции. В некоторых областях, связанных с машиностроением, без них не обойтись.К выводам микроконтроллеров ШД подключать напрямую нельзя. Будет мало нагрузочной способности по токам и напряжению на выходах, поэтому придется воспользоваться драйверами. Вот так выглядит схема униполярного шагового двигателя к Ардуино с биполярными транзисторами.У драйвера униполярного движка, который выполнен на Мосфит транзисторах, много плюсов перед биполярными транзисторами:
нет необходимости в радиаторах охлаждения транзисторов;
небольшие габаритные размеры;
реверс;
малые потери при открытом ключе;
применяется лишь 2 корпуса по восемь выводов.
Благодаря высокому уровню сигнала ключ открывается и по обмотке течет ток, а диоды призваны защищать ключи от выбросов напряжения при коммутациях. Вообще можно встретить с восемью выводами - у каждой обмотки вывод свой. https://youtu.be/zG6hnI-SspA

 Нужно рассмотреть эти агрегаты, разобраться в их особенностях и видах. У них есть как минусы, так и плюсы. А в управлении и подключении много тонкостей - все зависит от разновидностей моделей. Униполярные электродвигатели являются разновидностью электрических машин постоянного тока. Они содержат проводящие диски с постоянным магнитным полем, параллельным оси вращения диска и два токосъемника.
Нужно рассмотреть эти агрегаты, разобраться в их особенностях и видах. У них есть как минусы, так и плюсы. А в управлении и подключении много тонкостей - все зависит от разновидностей моделей. Униполярные электродвигатели являются разновидностью электрических машин постоянного тока. Они содержат проводящие диски с постоянным магнитным полем, параллельным оси вращения диска и два токосъемника.  Униполярный гибридный шаговый мотор в работе[/caption] Управляют им через дискретные импульсы, которые формируются на драйверах моторов. Первые шаговые движки выглядели как электромагниты, которые вращаются при включении храпового колеса. После каждого включения будет перемещение на 1 позицию. На протяжении эксплуатации двигатели будут оптимизироваться как конструктивные и функциональные устройства. В какой сфере применяют двигатели:
Униполярный гибридный шаговый мотор в работе[/caption] Управляют им через дискретные импульсы, которые формируются на драйверах моторов. Первые шаговые движки выглядели как электромагниты, которые вращаются при включении храпового колеса. После каждого включения будет перемещение на 1 позицию. На протяжении эксплуатации двигатели будут оптимизироваться как конструктивные и функциональные устройства. В какой сфере применяют двигатели: Плюсы ШД:
Плюсы ШД: Принцип работы постоянного Шагового двигателя[/caption] К группе биполярных моторов можно отнести ШД, которые подключают к контроллерам посредством четырех отпаек. Обмотка может быть параллельной и последовательной. Чтобы изменить направление тока, используют чипы, которые обеспечивают ручной образ управления. Достичь этого эффекта можно при помощи мостов. Биполярные агрегаты имеют меньшие размеры.
Принцип работы постоянного Шагового двигателя[/caption] К группе биполярных моторов можно отнести ШД, которые подключают к контроллерам посредством четырех отпаек. Обмотка может быть параллельной и последовательной. Чтобы изменить направление тока, используют чипы, которые обеспечивают ручной образ управления. Достичь этого эффекта можно при помощи мостов. Биполярные агрегаты имеют меньшие размеры.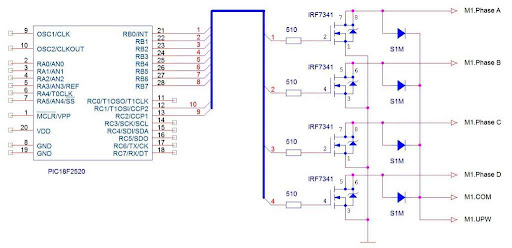 У драйвера униполярного движка, который выполнен на Мосфит транзисторах, много плюсов перед биполярными транзисторами:
У драйвера униполярного движка, который выполнен на Мосфит транзисторах, много плюсов перед биполярными транзисторами:
