
Основные конструктивные элементы
Коллекторная электрическая машина представляет собой оборудование, в котором датчиком углового положения вала и переключателем токовой нагрузки в электроцепях является одно и то же устройство, называемое щёточно-коллекторный узел. Общая структурная схема любого коллекторного двигателя (КД) схожа с другими типами электромоторов. Неподвижную часть называют статором/индуктором/индукторным колесом, подвижную/вращающуюся – ротором/якорем. Структура привода представлена на рисунке: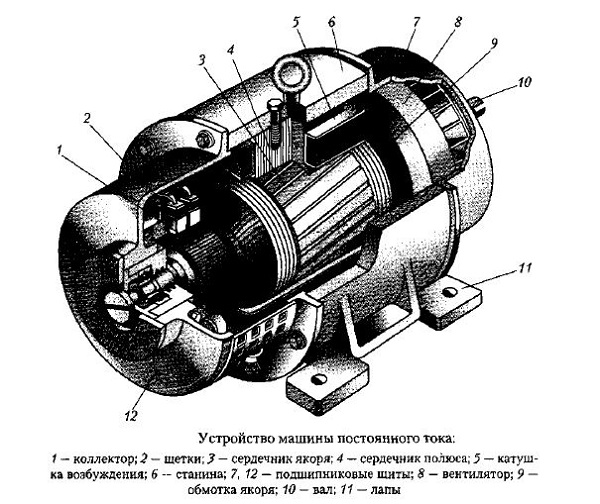 Статор содержит станину (опорную часть) и главные полюсы. Опорная конструкция служит для фиксации полюсов и щитов шарикоподшипников. Служит компонентом магнитопровода, поскольку является звеном, через который замыкается магнитный поток приводного оборудования. Опорная часть изготавливается из металла, является исключительно прочной и магнитнопроницаемой. Имеет в нижней части опоры, а по окружности специальные отверстия для закрепления сердечников главных полюсов. Как правило, это цельный элемент. Разъемное конструктивное исполнение реализовывается для вариантов с больших габаритов. Это облегчает транспортирование, сборку, обслуживание и ремонт. Главные полюсы, выполняющие формирование магнитного потока, содержат сердечник и полюсную катушку с намотанным проводом. Со стороны роторного узла сердечник имеет специальный наконечник, распределяющий магнитную индукцию во внутреннем пространстве КД. Сердечники изготавливают из листовой стали. В электродвигателях 220в малой мощности формируют бескаркасные полюса, с непосредственной намоткой электропроводника на предизолированный сердечник. В электромашинах мощностью более одного киловатта катушка представляет собой каркас с намотанным на него проводом. Структурная схема якорного механизма предусматривает следующие элементы:
Статор содержит станину (опорную часть) и главные полюсы. Опорная конструкция служит для фиксации полюсов и щитов шарикоподшипников. Служит компонентом магнитопровода, поскольку является звеном, через который замыкается магнитный поток приводного оборудования. Опорная часть изготавливается из металла, является исключительно прочной и магнитнопроницаемой. Имеет в нижней части опоры, а по окружности специальные отверстия для закрепления сердечников главных полюсов. Как правило, это цельный элемент. Разъемное конструктивное исполнение реализовывается для вариантов с больших габаритов. Это облегчает транспортирование, сборку, обслуживание и ремонт. Главные полюсы, выполняющие формирование магнитного потока, содержат сердечник и полюсную катушку с намотанным проводом. Со стороны роторного узла сердечник имеет специальный наконечник, распределяющий магнитную индукцию во внутреннем пространстве КД. Сердечники изготавливают из листовой стали. В электродвигателях 220в малой мощности формируют бескаркасные полюса, с непосредственной намоткой электропроводника на предизолированный сердечник. В электромашинах мощностью более одного киловатта катушка представляет собой каркас с намотанным на него проводом. Структурная схема якорного механизма предусматривает следующие элементы:- вал;
- сердечник с электрообмоткой;
- коллекторный узел.
Принцип действия
Работа коллекторного двигателя обеспечивается щеточно-коллекторным узлом (ЩКУ). Это связующее звено между электроцепью ротора и наружной питающей сетью. Фактически ЩКУ выполняет функции механического преобразователя переменного токового значения в постоянное и наоборот. Несмотря на то, что КД относятся к устройствам постоянного тока, для их функционирования необходимо наличие переменной токовой величины в роторной электроцепи. Являясь главной функциональной частью мотора, ЩКУ значительно усложняет его конструкцию по сравнению с бесколлекторными приводами. Соответственно, эти типы моторов уступают в надежности и требуют больших затрат на изготовление. Преобразование, обеспечиваемое ЩКУ, необходимо для того, чтобы в якорной обмотке протекал переменный ток. Только в этом случае происходит непрерывный процесс электромеханического преобразования энергии. Напряжение от источника постоянного тока подводят к щеткам привода. В результате его контакта с магнитным полем статора появляются электромагнитные силы (ЭМС) Fэм, создающие на роторе электромагнитный момент М. Как результат, якорь начинает вращаться. После его поворота на 180 градусов ЭМС не изменят своего направления. Это связано с тем, что одновременно с переходом каждого проводника обмотки ротора из области одного магнитного полюса в область другого в проводниках меняется направление токового потока. Схема внутреннего взаимодействия всех элементов ЩКУ представлена в виде упрощенной модели: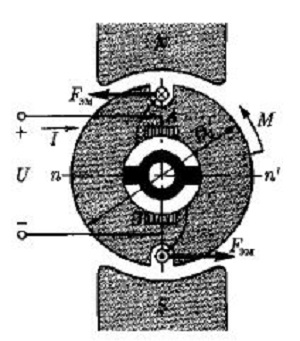 В зоне геометрической нейтрали nn' – середине межполюсной области – магнитная индукция и, соответственно, ЭМС равны нулю. Но с увеличением числа проводников в роторной обмотке, а именно при их равномерном распределении, и увеличением количества пластин коллектора момент вращения становится устойчивым и равномерным.
В зоне геометрической нейтрали nn' – середине межполюсной области – магнитная индукция и, соответственно, ЭМС равны нулю. Но с увеличением числа проводников в роторной обмотке, а именно при их равномерном распределении, и увеличением количества пластин коллектора момент вращения становится устойчивым и равномерным.Рабочий цикл и его характеристики
Полный рабочий цикл любого электропривода можно разделить на четыре технологических этапа:- пуск, в течение которого скорость вращения вала/якоря увеличивается от нуля до требуемого показателя;
- рабочий, во время которого мотор работает при неизменном напряжении на зажимах роторной цепи и электроцепи возбуждения;
- регулирования, когда осуществляется воздействие на внутренние цепи (якорного блока или возбуждения) с целью изменения оборотов вала;
- остановки, характеризуемой снижением скорости до нуля.
Пуск и его характеристики
Свойства электрических приводов определяются всеми четырьмя перечисленными выше группами характеристик: пусковыми, рабочими, механическими и регулировочными. Пусковые определяют работу эл/привода от включения до перехода к установившемуся режиму работы. При запуске коллекторного двигателя необходимо обеспечить выполнение следующих условий:- стартовый момент КД должен быть больше моментной величины статической нагрузки; в случае их равенства разгон прекращается;
- максимальная токовая нагрузка и моментная величина на старте должны находиться в диапазоне допустимых пределов.
Iкз = U/ra
Поскольку на естественной характеристике электросопротивление якоря очень мало, величина пусковой токовой нагрузки равна: Iкз = (10–15) IN. В отдельных случаях она может превышать номинальное значение в сорок раз. Такая нагрузка опасна для эл/двигателя, поскольку может вызвать «круговой огонь» на коллекторе и развить чрезмерно большой пусковой момент, оказывающий ударные воздействия на вращающиеся части механизма. Помимо этого Iкз вызывает резкое падение сетевого напряжения, что негативно влияет на других потребителей сети. Из приведенного выше уравнения следует, что плавный пуск коллекторного мотора осуществляется или снижением напряжения на обмотке якоря, или увеличением эл/сопротивления. При сетевом питании применяют включение пускового сопротивления. Для этого в электроцепь якоря вводят внешнее эл/сопротивление Rпр в виде резистора, что выражается формулой:Iкз = U/(Rпр + ∑r).
Параметры Rпр подбирают таким образом, чтобы Iкз не превысил допустимых токовых величин. Выбранное эл/сопротивление удовлетворяет условиям только начального пуска. Как только ротор начинает вращаться, в его электроцепях индуцируется ЭДС, ограничивающая токовый параметр ротора. Одновременно это вызывает уменьшение начального момента. Поэтому принимают меры для уменьшения Rпр путем включения резистора переменного эл/сопротивления, называемого пусковым реостатом. Реостат имеет ступенчатую регулировку и позволяет изменять эту характеристику от максимального до минимального значения.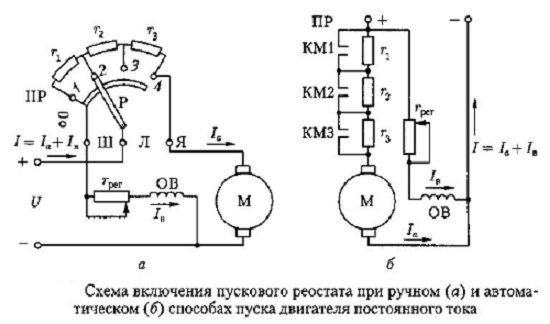 Запуск электроприводов мощностью 0,7-1,0 кВт при условии их включения без нагрузки осуществляют непосредственным включением в сеть. Безреостатный старт для маломощного электрооборудования опасности не представляет. Это объясняется относительно невысоким стартовым током, который благодаря повышенному эл/сопротивлению роторной обмотки и небольшим вращающимся массам превышает номинальный параметр в три-пять раз. К тому же продолжительность разгона такого типа мотора также невелика и действие Iкз кратковременно. Вторым способом запуска – регулированием напряжения – пользуются только при наличии индивидуального источника электроэнергии, допускающего регулирование подводимого к приводу напряжения. Примером может быть система «преобразователь-двигатель». Этот метод применяется для эл/моторов средней и большой мощности.
Запуск электроприводов мощностью 0,7-1,0 кВт при условии их включения без нагрузки осуществляют непосредственным включением в сеть. Безреостатный старт для маломощного электрооборудования опасности не представляет. Это объясняется относительно невысоким стартовым током, который благодаря повышенному эл/сопротивлению роторной обмотки и небольшим вращающимся массам превышает номинальный параметр в три-пять раз. К тому же продолжительность разгона такого типа мотора также невелика и действие Iкз кратковременно. Вторым способом запуска – регулированием напряжения – пользуются только при наличии индивидуального источника электроэнергии, допускающего регулирование подводимого к приводу напряжения. Примером может быть система «преобразователь-двигатель». Этот метод применяется для эл/моторов средней и большой мощности.Процесс плавного пуска
Мягкий пуск КД с минимальным временем обеспечивают посредством многоступенчатого пускового процесса. Количество ступеней допустимо выбирать произвольно. Оптимальным числом циклических этапов считается не более пяти. При резком уменьшении сопротивления происходит значительный бросок Iкз, что может привести к нарушению коммутации. Для обеспечения запуска принимают во внимание одно из допустимых критических значений пускового момента – максимальное или минимальное, то есть:Мп мин = (1,2–1,5) Мс ; Мп макс ≤ Мдоп.
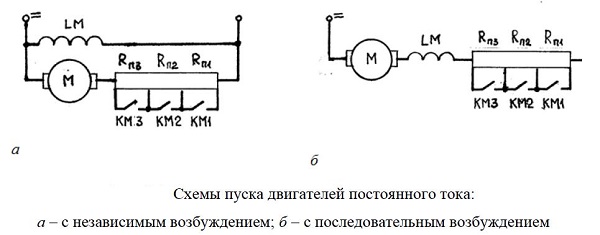 Каждому этапу соответствует собственная характеристика. Плавный пуск коллекторного электропривода производится следующим образом. При подаче электропитания на КД бросок моментной величины достигает допустимого максимума. Начинает набор скорости по первой характеристике. После достижения минимального значения момента машина переключается, часть электросопротивления выводится из якорной цепи (шунтируется). На следующей циклической ступени моментную величину снова увеличивают до максимального параметра, а при его уменьшении до минимума электродвигатель опять переключается, и очередная часть сопротивления шунтируется. Этот процесс повторяется до тех пор, пока электропривод не разгонится до рабочих оборотов. Для того, чтобы исключить превышение допустимых моментных пределов, необходимо правильно рассчитать эл/сопротивление. Старт и управление электроприводом в производственных условиях часто автоматизируют. Переключение ступеней реостата осуществляется контакторами, которые своими контактами по мере разгона мотора шунтируют элементы реостата при переключении ступеней резистора. Для управления скоростью эл/привода применяют частотные преобразователи, сервоприводы, а для сложных приводных систем используют логические программируемые контроллеры. Выбор того или иного способа управления зависит от задачи, которую должен выполнять электропривод.
Каждому этапу соответствует собственная характеристика. Плавный пуск коллекторного электропривода производится следующим образом. При подаче электропитания на КД бросок моментной величины достигает допустимого максимума. Начинает набор скорости по первой характеристике. После достижения минимального значения момента машина переключается, часть электросопротивления выводится из якорной цепи (шунтируется). На следующей циклической ступени моментную величину снова увеличивают до максимального параметра, а при его уменьшении до минимума электродвигатель опять переключается, и очередная часть сопротивления шунтируется. Этот процесс повторяется до тех пор, пока электропривод не разгонится до рабочих оборотов. Для того, чтобы исключить превышение допустимых моментных пределов, необходимо правильно рассчитать эл/сопротивление. Старт и управление электроприводом в производственных условиях часто автоматизируют. Переключение ступеней реостата осуществляется контакторами, которые своими контактами по мере разгона мотора шунтируют элементы реостата при переключении ступеней резистора. Для управления скоростью эл/привода применяют частотные преобразователи, сервоприводы, а для сложных приводных систем используют логические программируемые контроллеры. Выбор того или иного способа управления зависит от задачи, которую должен выполнять электропривод.Способы мягкого старта
Рассмотренный выше плавный пуск коллекторного мотора относится к классическому реостатному методу, подходящему как для постоянного, так и переменного тока. Его отрицательные стороны заключаются в потере значительной части мощности на нагрев сопротивления реостата и громоздкости устройства. Поэтому такой способ практически и экономически оправдан только для запуска эл/привода, но не регулирования рабочих параметров скорости. В общем случае запуск приводных устройств и электроинструментов может выполняться и другими методами с применением:- трансформаторов;
- полупроводниковых ключей.
- тиристоры и симисторы;
- полевые транзисторы MOSFET с изолированным МОП затвором;
- транзисторы IGBT.